多类时延下混合车辆队列建模与协同控制
by 胡满江 1,2,卜令坤 1,秦洪懋 1,2,周 岩 3,边有钢 1,2,孙 宁 1,郑讯佳 4 from Automotive Engineering 2022 年(第 44 卷)第 9 期
摘要
多类时延下同时具有人类驾驶车辆(HDV)和网联自动驾驶车辆(CAV)的混合车辆队列建模与协同控制方法。
- 建模(一般形式的混合车辆队列系统模型,表征CAV 的数量与空间分布,引入驾驶员反应时延)
- 设计了状态反馈控制器(考虑 V2V 通信时延和传感器量测时延,推导和计算了闭环系统特征方程的稳定性条件)。
- 数值仿真(验证了控制器设计的有效性,定量展示了 CAV 对衰减交通波动的作用,并分析了各类时延对交通流波动的影响。)
前言
- 当前研究大多集中在完全网联环境
- 系统控制性能:考虑内稳定性(跟驰误差渐近收敛至零)和队列稳定性(系统特征值均具有 负实部 ,劳斯–赫尔维茨稳定性判据)
- 多类时延(通信延迟、驾驶员反应时间)
- 本文主要贡献:
- 考虑通信和传感器延时,在OVM (最优控制模型)基础上引入驾驶员反应时延和非线性驾驶行为描述
- 基于自车和邻近车辆加权误差,设计了混合车辆队列的状态反馈控制器,推导了带多类时延 的闭环系统特征方程,导出了系统闭环稳定性的充分条件,保证队列跟踪误差的渐近稳定
系统建模
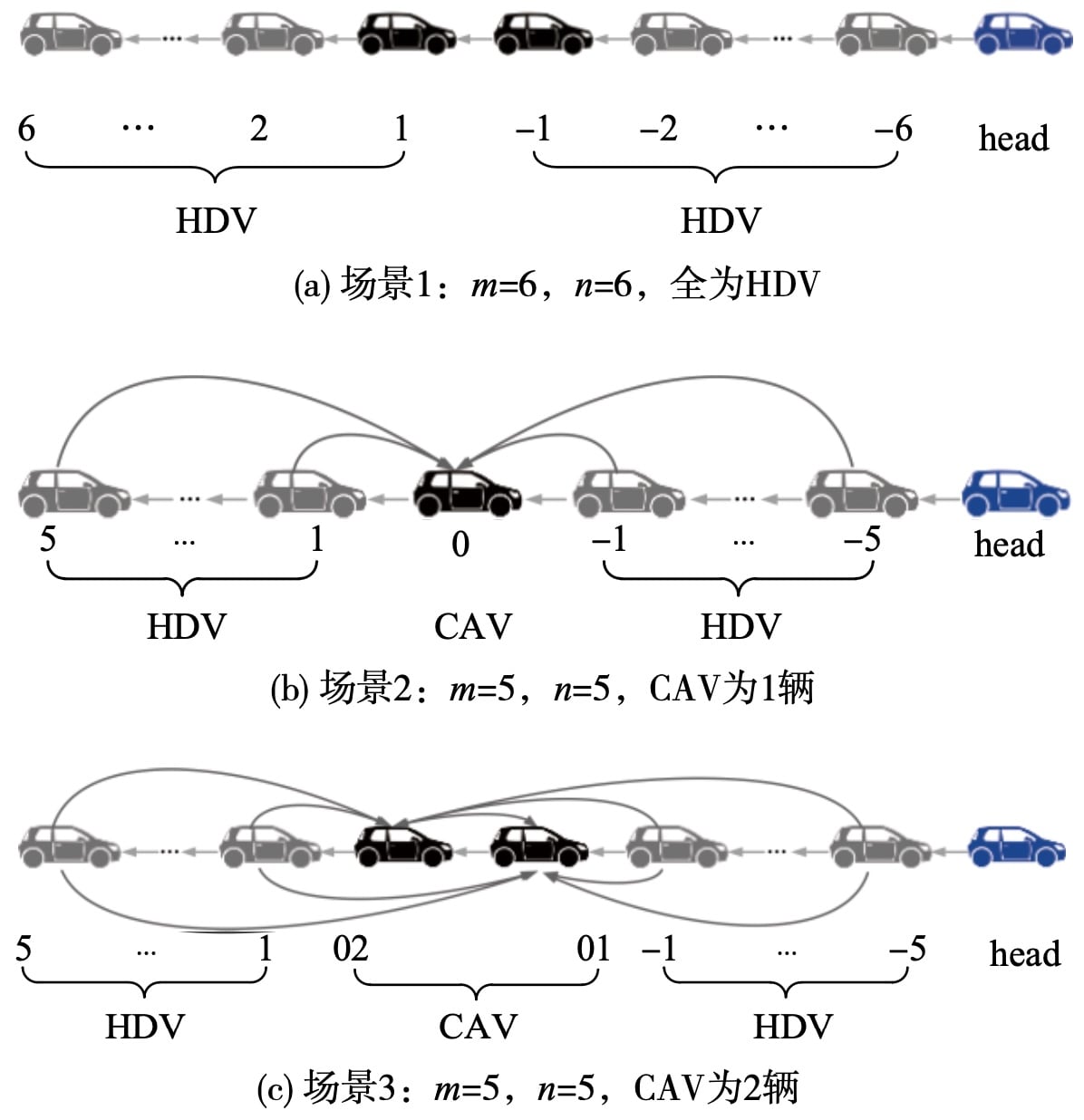
建立 HDV 和 CAV 纵向跟驰模型:nxHDV + 1xCAV + mxHDV
-
HDV 的纵向跟驰模型
最优控制模型(OVM) + 智能驾驶员模型(IDM)
-
CAV 模型
双积分器的线性模型,加速度信号直接作为控制输入。
-
系统模型
将纵HDV向跟驰模型加入匀质驾驶员反应时延。
控制器设计与系统稳定性分析
将自车误差和邻近车辆的误差作为反馈信号,设计CAV 状态反馈控制器。
推导系统闭环状态方程的闭环稳定性的充分条件。
仿真和实车实验
数值仿真验证
采用 OVM 作为 HDV 的描述模型,对两组场景(m = n = 5,CAV分别有1辆和2辆),与对照组CAV=0 做对比。
对比了不同加速度、通信和驾驶员延时的行驶误差:
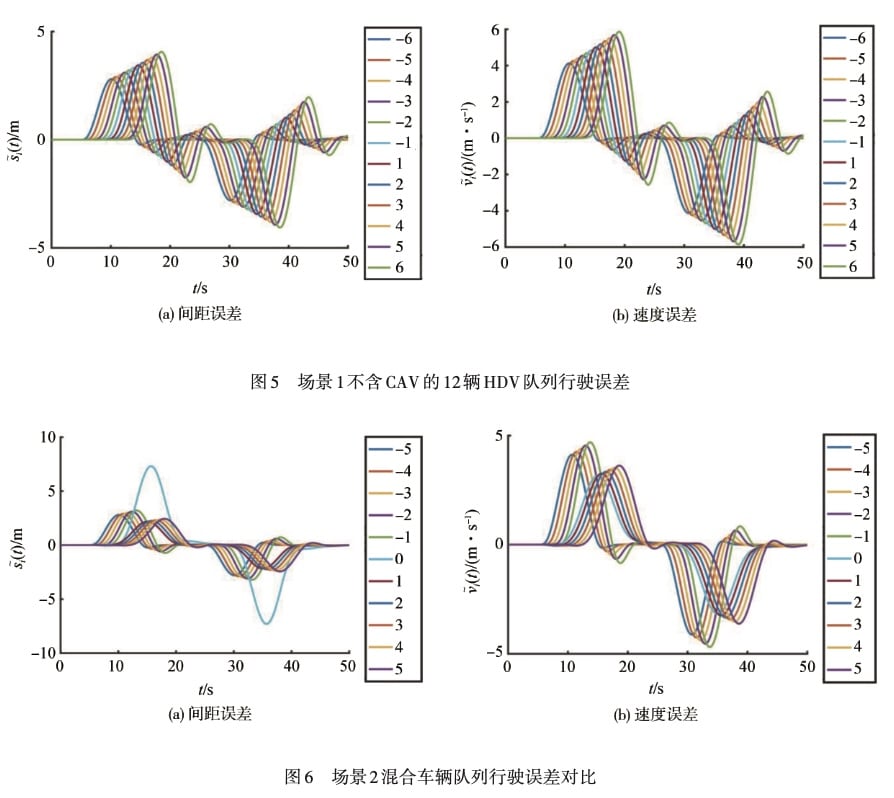
当队列中包含有CAV 时,其间距误差和速度误差均会被衰减。CAV 后面的 1~5 号跟驰车辆,间距误差和速度误差的峰值衰减幅度高于 35%,
实车验证
三辆AGV ,底盘基于期望速度控制,对于决策层向底盘下发的期望加速度指令,通过数值积分算法可获得期望速度。
GNSS 每 10 ms 采 集一次位置和速度信息并发送至决策层。
AGV 之间通过 WiFi 进行 实时通信,通信时延约 10 ms。
领航车的位置和速度轨迹存储在1 号车的本地存储器,其余车辆通过WiFi 传递位置和轨迹信息。
对照和实验组的区别是2号是否使用本文的算法计算得到期望输入。
智能网联汽车队列成形控制及队列稳定性研究
by 徐利伟 from 东南大学机械工程学院 博士毕业论文
摘要
多车队列控制:
- 队列成形控制
- 队列稳定性控制。
挑战:
- 对任意状态下的车辆难以安全 及高效地实现队列成形控制
- 在多干扰和通信时滞下难以保持队列稳定性
- 对弯道队 列中存在的纵横向耦合问题现有的建模及控制架构难以有效解决
- 队列节能和队列稳定性难以兼具等问题。
本文:
-
队列编队的稳定规划和跟踪:
构建多车队列成形控制系统(侧向动力学稳定和执行器饱和问题,基于分布式分层控制方法)
分布式队列控制系统(基于车辆稳定边界并结合多智能体群集控制算法)
-
多因素整合到多车队列系统中,构建了涵盖干扰、时滞及参数不确定的多车异质队列模型:
提出了在干扰及时滞下的多车队列系统稳定性判据、分布式鲁棒控制方法。
-
研究了弯道队列涉及到纵横解耦控制及稳定性分析:
构建了涵盖道路信息的队列随路模型和队列侧向道路跟踪模型
分析了弯道队列系统的队列稳定性,提出了多车队列系统在弯道上的队列稳定性判断方法。
-
兼顾节能和队列稳定:
提出了一种变间距策略方法,计算出了每辆跟随车的能量最优速度分布。
-
搭建了智能网联汽车队列微缩平台,队列纵向稳定性和纵横耦合控制分别进行了实车试验。
绪论
- 内稳定性和队列稳定性:
- 内稳定关注于队列“局部”状态,要求队列中前后车辆间的距离误差和速度误差在干扰下趋向于零
- 队列稳定则从“全局” 出发,要求整个队列“自上而下”地实现距离误差和速度误差在干扰下的收敛
多智能体群集运动策略下的多车队列成形控制
- 车辆极可能是以不同的车速行驶在不同的车道内
- 多智能体的群集运动控制是一个典型的分布式协调控制问题,关键在于设计局部规则达到一致性。
- 基于Olfati-Saber 所提出的多智能体分布式群集运动控制框架来对位于不同车道、以不同车速行驶的车辆实施编队控制。
车辆系统模型
将完整的车辆系统分解为运动学模型和动力学模型:
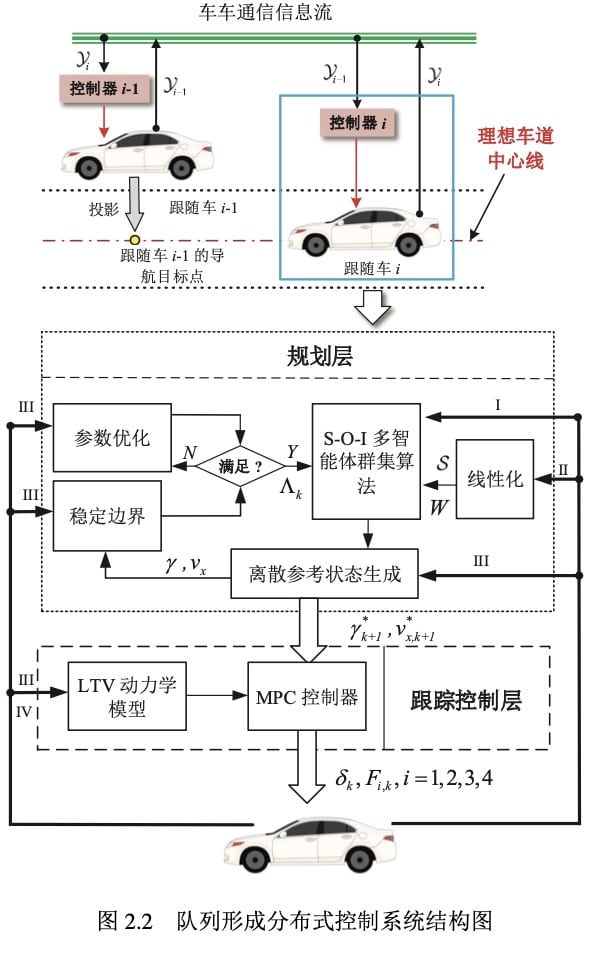
队列成形分布式控制
分布式队列成形控制方法:
- 基于多智能体群集运动策略
- 保证具有不同初始状态的车辆安全且稳定地组成队列系统
规划层控制器设计:
- 建立车辆动力学稳定边界(纵向车速和横摆角速 度约束条件)
- SOI 多智能体体群集算法优化(用稳定性边界条件对集群算法作参数优化)
跟踪层控制器设计:
MPC 构建状态跟踪控制器
多时滞及干扰下的队列纵向稳定性控制
采用李雅普诺夫泛函+ 鲁棒控制方法设计了控制器,给出了在能量有界干扰及信息时滞下的队列 L2稳定判据。
异质队列纵向动力学模型
- 采用 PLF 跟随式结构,针对异质队列进行单车动力学建模
- 采用固定车距来构建队列模型,采用线性控制律来构建队列控制系统
- 采用等效时滞和网络诱导时滞对无线通信和车载传感器中的数据延迟进行量化。
队列鲁棒控制
设计控制器的损失函数和控制目标
采用李雅普诺夫泛函+ 鲁棒控制方法
队列纵向稳定性分析
从队列鲁棒控制出发,对队列系统的稳定性进行分析,并由此得出系统稳定性的充分条件。
异质队列系统纵横解耦控制及稳 定性分析
在弯道上行驶时的纵横耦合问题:
不仅要依据车间 距策略实现队列安全、稳定行驶,同时还需构建队列对道路的良好“跟踪性”,用于防 止道路侧向偏离下的车辆交通事故。
弯道异质队列系统模型
PLE 通信拓扑+车辆内部不含有状态时滞
建立涵盖道路信息的六自由度车辆动力学模型,对其进行线性化,车辆系统转变为三个SISO
队列的车间距策略应基于车辆间的道路弧长而非直线距离来设定,建立基于道路弧长的车辆动力学模型。
- 随路队列模型
- 侧向道路跟踪模型
异质队列鲁棒控制器设计
基于异质弯道队列纵向动力学模型和车辆侧向道路跟踪模型来建立异质队列控制系统:
对每辆跟随车均分别建立:
- 队列稳定性控制器
- 道路跟踪鲁棒控制器
弯道异质队列稳定性分析
给出了弯道异质队列系统在外界干扰下的队列稳定性判据
兼顾节能与稳定性的队列巡航策 略设计及研究
针对匀质队列系统,依据单车 能耗特征和队列稳定性控制特点,提出了一种新的队列巡航策略
单车车辆系统模型建立
车辆纵向动力学模型、电机模型和电池包模型
最优能量车间距策略设计
固定时距/车距与能量最优速度的矛盾,重新设计理想车间距
离散队列模型构建和稳定性控制器设计
分层控制器:
- 能量最优速度规划层
- 鲁棒稳定控制层
智能网联汽车队列微缩平台开发及试验研究
与实车按照1:5 的比例搭建了自主行驶小车平台
微缩平台开发
-
硬件:
- 外部环境感知模块(激光雷达和摄像头)
- 自身状态获取模块GPS和轮速编码器
- 无线信息传输模块WIFI
- 控制单元(主控制器和下层控制器组成)
-
软件架构: ROS
混行交通流跟驰行为分析及队列控制研究
by 王猛 from 吉林大学 博士学位论文
摘要
研究混行交通流中不同类型车辆的跟驰行为,进行了混行车辆跟驰建模与仿真。
- 基于分子动力学建立考虑前后多车状态信息的 CAV 跟驰模型
- 前后多车的速度、车间距、速度差等信息的 CAV 跟驰模型
- 量化表达车速车距对主体车的影响权重
- 不同类型车辆(四种紧邻车非 CAV 场景)差异化的减速度策略
- 建立考虑驾驶人特性的 HDV&AV 混行车辆跟驰模型
- 利用数据分析不同前车对HDV 和 AV 跟驰行为的影响
- 考虑驾驶人特性,构建 HDV&AV 混行车辆跟驰模型
- 搜集实车数据实车数据对模型进行参数标定、敏感性分析和模型验证。
- 考虑 CAV 渗透率的混行交通流稳定性分析
- 提出混行交通流中 CAV、 AV 和 HDV 稳定状态下的数学期望比例解析式
- 建立不同 CAV 比例下的混行交通流基本图模型,探究混行车辆环境下交通流通行能力的影响因素
- 考虑不同驾驶人风格和 CAV 渗透率的混行队列运行研究
- 研究城市道路条件和高速紧急制动状态下不 同类型车辆的引导对车队加速和减速的控制。
- 探究 CAV 和 AV 分别影响后方 HDV 的车辆数以及三种驾驶风格 HDV 的加入对引导车辆数的影响
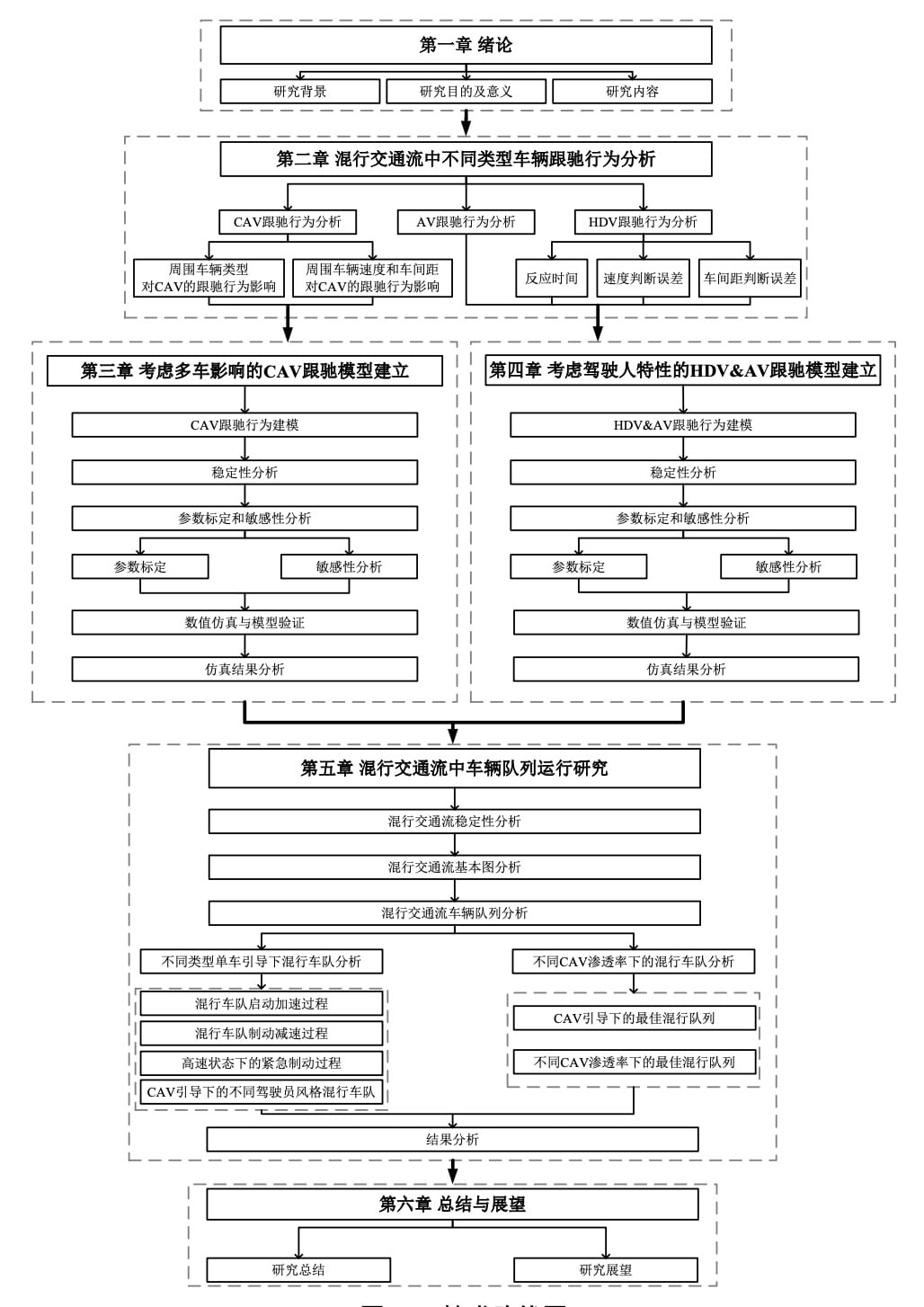
混行交通流中不同类型车辆跟驰行为分析
分别对 CAV、AV 和 HDV 在混行交通流中的跟驰行为进行分析
CAV
除了能获得紧邻前后车辆的运动状态,还可以获得下游交通流量状况。
CAV 能够以极低的延迟紧跟前车进行加速或减速操作。
AV:没有V2V
相比 HDV,它拥有更快的启动和制动能力,AV 跟驰过程中有明显的速度波动。特别是在加速过程中,AV 速 度波动较大且该波动会传播到其余车辆。
HDV
设计了一个实验,进行了 HDV 跟驰 AV 和 HDV 跟驰 HDV 。
-
反应时间与速度的关系
与低速状态相比,高速 状态下的驾驶人反应时间波动幅度更小,呈对数曲线趋势。
-
速度判断误差与速度的关系
利用 OBU 数据,将前车速度作为期望数据,跟驰车速度作为驾驶人对前车的判断速度,后的判断误差。
随着车辆速度的增加,驾驶人的判断误差逐渐增大
-
车间距与速度的关系
分为三类: 激进型驾驶人、谨慎型驾驶人和常规型驾驶人。
利用模糊聚类对不同车距下各类驾驶人的感知车间距进行统计。
在相同车间距情况下,相比较常规和谨慎型驾驶人,激进型驾驶人感知的车间距比实际车间距更大。
考虑多车影响的CAV跟驰模型建立
改进 IDM 建立 CAV 跟驰模型:
- 将考虑周围车辆的速度和它们与主体车之间的车间距等信息, 计算主体车的加速度策略以及周围车辆的类型对 CAV 跟驰行为的影响。
- 定量化表达每辆车对主体车的影响程度,并 且根据主体车与紧邻前车间的位置关系,界定了前方多车影响作用的适用性。
- 利 用 CAV 混行车辆跟驰数据,对 CAV 跟驰模型参数进行标定和模型精度验证。
CAV 跟驰行为建模
CAV 与其它两种类型车辆的跟驰决策有着明显的不同,既需要考虑周 围车辆的运动信息,还要考虑周围车辆的类型对 CAV 跟驰行为的影响。
将运动的车辆视 为分子,并根据分子动力学理论计算每一辆前车和后车与主体车之间的吸引和排斥。
考虑到CAV 跟驰受到周围车辆类型的影响,分为以下四种情况:
-
当主体车最邻近的前方车辆是HDV或AV,而车队中其他车辆都是CAV时 ,CAV 跟驰模型中最邻近前方车辆的减速敏感性系数与 AV的减速敏感性系数相同
-
当主体车紧邻后方车辆为HDV或AV时,CAV跟驰模
型中紧邻后车的减速敏感性系数与AV的减速敏感性系数相同。
-
当主体车紧邻前后车都是HDV或AV时,CAV跟驰模型中紧邻前后车辆的减速敏感性系数与AV的减速敏感性系数相同。
-
车队中的所有车辆均为CAV
稳定性&曲线分析
将线性 稳定性分析推广到本文建立的 CAV 跟驰模型,对交通流稳定性条件和稳定性曲线进行分析。
主体车接收到的前后车信息越多,越有利于掌握整个车队的运行趋势,提前做出相对有效的跟驰决策,从而达到平稳 运行的效果,
参数标定和敏感性分析
采用 PATH 实验室 CAV 跟驰不同类型车辆的实车数据对CAV 跟驰模型的参数进行标定。
并对参数的敏感性进行了分析,&仿真效果验证
考虑驾驶人特性的 HDV&AV 跟驰模型
提出了基于 FVAD 的混行车辆跟 驰模型来描述 HDV 和 AV 的跟驰行为
HDV & AV 跟驰行为建模
利用实车数据分别对 HDV 和 AV 的加速策略参数进行标定。
提出了一个基于 FVAD 模型的混行车辆跟驰模型,该模型既考虑了紧邻前后车辆的运动信息,还考虑了驾驶人的驾驶特性。
稳定性分析
混行车辆跟驰模型的传递函数是一个闭环系统,从整体稳定性角度分析,混行跟驰模型控制下交通流的稳定性优于 FVAD 模型。
参数标定和敏感性分析
利用实车跟驰数据对本文提出的模型进行参数标定,获得 AV 跟驰模型的最佳值
混行交通流中车辆队列运行研究
对混行交通流 车辆队列的运行特征进行研究,对三种车辆组成的混合交通流作稳定性进行证明与敏感性分析。
分析交通流基本图,并对混行队列运行特征进行分析。
混行交通流稳定性分析
跟驰行为的不稳定性所引发的扰动(例如行间距和速度偏离稳态)随时间和空间的增长是导致交通流不稳定的主要原因.
推导混行交通流线性稳定性条件,进行稳定性热力图像分析。
然后进行了稳定性随参数的敏感性分析(最小车间距和车头间距)
混行交通流基本图分析
得出不同 CAV 渗透率下的速度-流量图像。
混行交通流车辆队列分析
数值仿真拟合不同类型车辆引导下队列交通流特征的变化
分城市道路(起步和刹车过程)和高速公路(紧急制动情况下速度和加速度的变化)两种工况,进行分析。
智能网联混合动力汽车队列分层优化控制方法研究
by 邱利宏 from 合工大博士学位论文
摘要
以MPC 为主要方法,提出了混合动力汽车队列分层预测控制构架,考虑系统误差的燃油经济性控制,基于预测信息的能量管理优化,集成了垂向振动燃油经济性控制。
主要工作:
- 考虑效率反馈的CAV 车队分层预测控制,控制架构分为两层
- 上层:基于混合动力汽车油耗、相对距离、SPAT 得到的目标车 速以及加速度,设计基于 MPC 的控制算法,优化混合动力汽车队列的目标车速
- 下层:以燃油经济性为目标,以动力电池 SOC 均衡为主要约束,基于 A-ECMS 能量管理控制算法进行混合动力汽车能量管理。
- 下层控制器周期性地计 算平均驱动效率和能量回收效率并将其反馈至上层控制器,用于修正上层控制器 中与效率相关的油耗模型。
- 实时车速预测及能量优化管理:
- 上层:针对 MPC 优化问题的具体结构,采用牛顿迭代法求解 KKT 方程并基于近似方法求解牛顿迭代方程,设计了基于 F-MPC 实时预测混合动力汽 车队列最优目标车速。
- 下层:基于动力部件的 Willans Line 模型,将 ECMS 控 制算法线性化,设计了基于 WL-ECMS 进行混合动力汽车队列实时能量管理控制策略。
- 考虑控制系统随机误差的网联混合动力汽车队列闭环协同控制方法:
- 上层:上层控制器考虑了控制系统的随机误差,基于 Markov 决策 建立随机误差模型及其概率转移矩阵,基于 SMPC 处理随机误差,并基于方案树 简化 SMPC 问题,缩短计算的时间成本
- 下层:基于 A-ECMS 进行混合动力 汽车队列的能量管理,建立了驱动和回收效率模型并实时反馈至上层控 制器进行下一时刻的车速优化。
- 基于预测信息的网联四驱混合动力汽车能量优化管理控制方法:
- 描述了基于规则的四驱混合动力汽车控制策略
- 设计了基于 ECMS 的控制策略
- 基于预测信息的等效因子全局优化以及分段优化
- 四驱混合动力汽车队列能量管理的全局优化
- 集成垂向振动的混合动力汽车燃油经济性控制
- 结合整车纵向动力学与悬架系统垂向动力学
- 建立 综合优化燃油经济性、交通流畅性、跟车距离、垂向舒适性以及纵向舒适性的 MPC 模型。
考虑效率反馈的智能网联混合动力汽车队列分层预测控制
基于 V2V 和 V2I 获取的车辆位置、相对位置、车速以及交通信号灯的状态信息等, 设计 MPC 算法,求解车辆队列的最优目标车速。
- 首先设计分层控制系统,上层控制系统求解目标车速,下层控制系统进行能量优化管理。
- 基于分层控制系统,设计考虑效率反馈的能量管理控制策略,实现闭环控制。
基于智能网联的分层控制原理
- 上层控制 系统以提高车辆燃油经济性、减少交通拥堵、减少加减速次数、降低实际跟车距离与理想跟车距离的差值为目标,在满足整车纵向动力学的约束条件下,通过 MPC 算法优化控制变量,即单位质量牵引力或制动力(加速度),得到最优目标车速。
- 下层控制系统根据上层控制系统的最优目标车速,以燃油经济性最优为目标,在保 障动力电池 SOC 波动范围的前提下,通过 A-ECMS 算法优化发动机和动力电池之 间的功率分配。
- 下层控制系统周期性的计算整车模型的平均驱动效率和能量回收效率,并反馈给上层控制系统。上层控制系统根据下层控制系统反馈的效 率,更新油耗模型中的效率参数并用更新后的效率预测未来的最优目标车速
- 上层控制器系统可以采用路侧单元中的服务器远程计算并通过无 线网络将最优控制指令发送给每辆车。
混合动力系统模型
同轴并联非插电式混合动力汽车,对其进行了纵向动力学模型建模。
对发动机模型进行了经验建模法。对ISG 电机模型、电池模型、自动变速箱模型、驾驶员模型(PID)分别进行了建模。
上层控制系统建模
主要用于预测最优目标车速,通过优化车辆的加速度来优化每一辆车单位距离的油耗。
针对红绿灯头车问题,基于 SPAT 信息,减少混合动力汽车红灯停车的次数。
设计了分布式 MPC 算法,优化单位行驶里程的油耗、实际跟车距离与理想跟车距离的差值、最优目标车速与基于 SPAT 的目标车速的差值、混合动力汽车的纵向加速度。使用SQP 求解非线 性的 MPC 目标函数
并与Gipps和CCC模型进行了对比。
下层控制系统建模
目标:在满足物理约束的条件下,跟随上层控制器的目标车速,并进行发动机和动力电池的最优功率分配。
采用 A-ECMS 进行混合动力汽车 的能量管理。
仿真结果
将A-ECMS 控制策略潜入Autonomie 整车模型,对并联式混合动力 汽车模型进行了二次开发。
针对红绿灯场景下不同网联渗透率,与Gipps和CCC模型作燃油经济性、效率反馈周期对比。
智能网联混合动力汽车队列实时车速预测 及能量优化管理
考虑效率反馈的智能网联混合动力汽车队列分层预测控制,研究CAV 混合队列实时能量管理。
上层控制系统基于 F-MPC 求解,下层控制系统基于 WL-ECMS 进行混合动力汽车的能量管理。
上层控制系统的建模
- 综合考虑 SPAT 信息、混合动力汽车最优巡航车速信息以及车辆安全,求解 目标车速的参考值。
- 利用 MPC 的方法,建立最优目标车速求解的优化函数
基于 F-MPC 的最优目标车速求解
由于基于 SQP 求解 MPC 优化问题的计算时间维数和成本问题,以及其不适合时变控制系统,采用近似方法求解 MPC 目标函数
基于 WL-ECMS 的能量管理
ECMS 可以显著降低计算的复杂程度而不过多的牺牲最优解的精度
本章基于发动机和电机的 Willans Line 模型,将基于 搜索的 ECMS 算法规则化,以实现实时控制
仿真结果
- 分层控制的基本性能;
- 上层控制算法控制效果的对比;
- 下层控制算法控制效果的对比
虑随机误差的网联混合动力汽车队列 闭环协同控制
建立分层控制模型:
- 上层控制器基于马尔科夫(Markov)决策,建立考虑随机误差的整车纵向动力学模型,基于 SMPC 算法,求解混合动力汽车最优目标 车速。
- 下层控制器基于 A-ECMS 进行混合动力汽车能量管理,提出一种考虑实时 效率反馈的控制算法,修正上层的油耗模型。
优化问题描述
-
车辆队列纵向动力学模型方面,为了在模型中体现出系统的随机误差,入考虑随机误差的控制变量。
-
燃油经济性优化方面,上层控制系统的油耗优化模型实质为期望的优化问题,立了考虑随机误差的油耗模型。
-
基于 SPAT 的目标车速求解
基于 SMPC 的最优车速预测
采用马尔科夫决策过程建立随机误差模型,MPC 优化问题即被转化为 SMPC 优化问题。
基于通用算法 SQP 求解。求解得到控制变量之后,根据考虑误差的混合动力汽车纵向动力学模型,即可得到对应的最优目标车速。
基于 A-ECMS 的能量管理
A-ECMS 的优化问题与上节相同。基于 Autonomie 的高精度 Simulink 整车模型,动力电池的电荷消耗已经被转化为燃油消耗。
实时计算驱动和回收效率,并反馈至上层控制器。可以实时反馈效率是因为在每一时刻驱动和能量回收效率可以利用 可测量的参数计算。
仿真结果
……
基于预测信息的智能网联四驱混合动力 汽车能量优化管理
以四驱混合动力汽车队 列为研究对象,基于预测工况建立 ECMS 等效因子的在线优化模型,并采用 DP 算 法进行四驱混合动力汽车队列能量管理全局优化算法和基于规则的控制算法进行 对比。
四驱混合动力汽车的建模
建立了非插电式非实时四驱的混合动力汽车的:
- 发动机模型
- 电机模型
- 动力电池模型
- 变速箱模型
- 离合器模型
- 整车纵向动力学模型
- 传动系统模型
基于规则的四驱混合动力汽车控制策略
以基于规则的算法作为基础,设计ECMS,采用 Simulink 建立四驱混合动 力汽车整车模型,其对应的控制策略主要基于 State-flow 开发。设计了控制策略的状态流。
基于预测信息的能量优化管理
应用智能网联环境下基于 MPC 得到的预测车速信息,进行混合动力汽车队列燃油经济性优化。
仿真结果
……
集成垂向振动的智能网联混合动力汽车队列 燃油经济性预测控制
集成了悬架系统动力学与整车纵向动力学。建立了考虑 垂向振动的 MPC 优化模型,基于 F-MPC 进行优化模型的快速求解。分析了不同 SPAT 下考虑垂向振动对车速曲线、垂向舒适性、纵向舒适性以及燃油经济性的影响。
优化问题的描述
建立集成车辆动力学和悬架动力学的集成优化模型。
同时考虑油耗模型& 路面激励模型& 能量管理优化模型
集成垂向振动的模型预测
以燃油经济性、交通流畅性、纵 向舒适性、垂向舒适性为优化目标,建立分布式 MPC 优化模型,预测每一辆车的最优目标车速。
仿真结果
……
基于博弈论的车辆队列运动协同分层控制算法研究
by 刘阳 from 吉林大学博士学位论文
摘要
虑队列内车辆纵向间距决策的竞 争和合作关系,二维场景中存在横纵向运动耦合效应,处理与队列外车辆的路权冲突等问题。
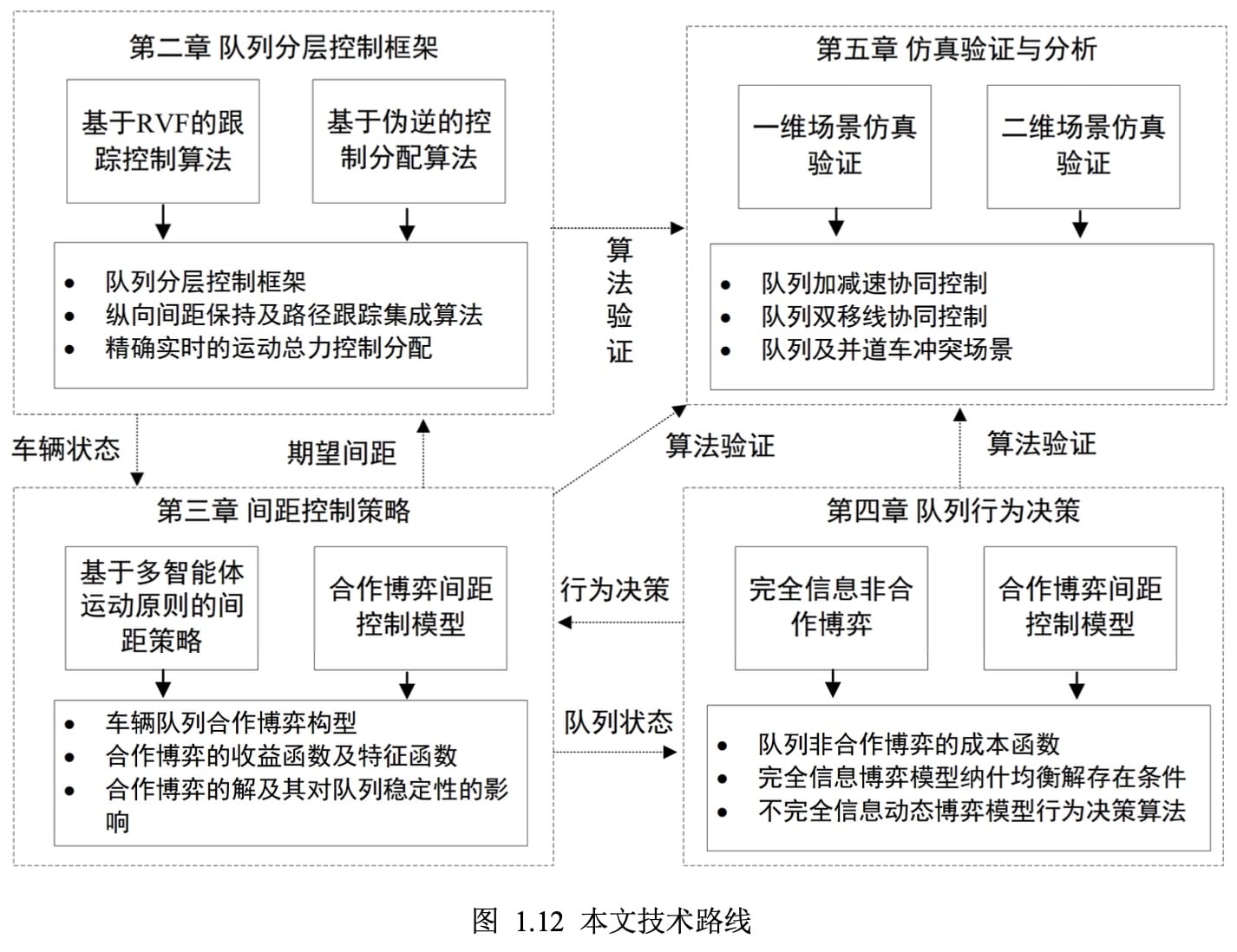
- 针对车辆队列在二维场景中出现路权冲突及横纵向运动耦合问题:提出了包括队列行为决策层,队列运动控制层及车辆底盘控制层的车辆队列分层控制算法框架。
- 框架包括队列行为决策层,队列运动控制层及车辆底盘控制层
- 向量场路径跟踪算法,实现了队列层及车辆层的横纵向解耦合跟踪控制
- 改进了直接利用伪逆矩阵进行控制分配的算法,利用加权、循环及修正,实现有约束 轮胎力控制分配,提高了轮胎力分配精度与实时性
- 将间距控制策略视为空间最优分配,结合生物界智能体的“群聚运动”机制及合作 博弈,提出了适用于队列空间分配的间距控制策略
- 提出了适用于与外部车辆进行路权竞争的队列无限策略完全信息博弈模型 及有限策略不完全信息动态博弈模型。
- 基于 CarSim 车辆动力学仿真软件及 MATLAB/Simulink,建立了车辆 队列协同控制仿真平台,对本文提出的分层控制算法进行了验证与分析
车辆队列分层控制算法
将复杂的多车协同问题分解为不同的功能层,依次解决从而降低系统的复杂性。
控制架构为三层式架构:
- 包括队列行为决策层
- 队列运动控制层
- 车辆底盘控制层
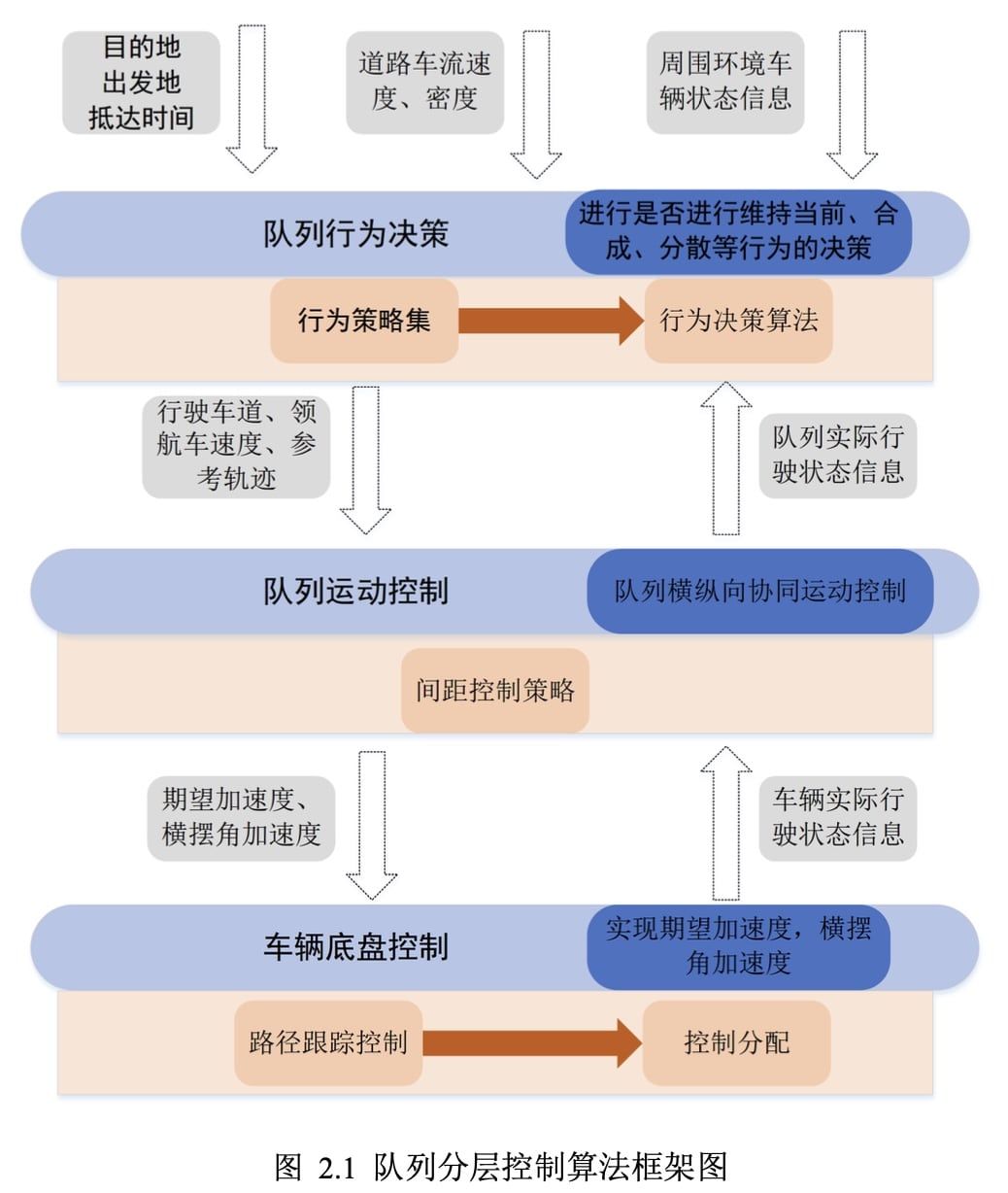
开发实现纵向间距保持及横向路径跟踪功能的横纵向耦合跟踪控制算法,用于车辆底盘控制层的横纵向耦合跟踪控制;
设计考虑物理约束 的控制分配算法,保证其控制分配精度及分配实时性,实现车辆底盘控制层的控制分配功能。
队列运动控制算法
采用基于领航车轨迹及速度序列的跟踪模式。
基于参考向量场,结合间距 控制策略提供的纵向期望位置,构建横纵向耦合路径跟踪算法,从而同时实现纵向间 距保持与横向路径跟踪功能。
提出哈密尔顿参考向量场法(H-RVF),实现对期望的参考向量进行跟踪。并对其进行稳定性分析。
为了验证利用哈密尔顿函数对参考向量场的改善度,本文分别构建了 H-RVF、MPC, 并将其应用于车辆队列的跟踪控制,进行跟踪算法对比分析。
提出的车辆节点分层控制器,分析队列协同控制工况下实现纵向间距 误差及路径跟踪误差的收敛性。
车辆底盘控制分配算法
提出一种轮胎力分配方法,将运动控制器中输出的虚拟力、力矩分配到各个车轮,解决车辆队列分层控制器中的控制分配问题。
提出一种控制分配方法,考虑轮胎力饱和及物理约束的前提下,找到 F 矩阵, 使得 NF-V 误差最小。
对比基于线性二次规划的分配方法,加权伪逆分配法,伪逆再分配法 以及加权伪逆法在极限工况下的轮胎力分配问题进行对比,评价指标包括计算速度, 跟踪误差,最大轮胎利用率等。
队列内车辆合作博弈间距策略
提出基于自然界群聚行为间距策 略,并将其应用于车辆队列的间距控制中,将纵向间距作为收益分配给队列中的参与 车辆,进而实现队列内车辆的一致性控制。
基于仿生运动规则的间距控制策略
提出一种基于仿生运动规则的间距控制策略:
-
避免碰撞,避免车与车之间发生碰撞,
-
速度匹配,实现速度一致性控制
-
中心聚集,提高本地车辆控制器、队列以及交通流的稳定性。
对其进行建模。
车辆队列合作博弈模型
结合车辆队列合作博弈模型的定义与性质进行分析,求出合作博弈的解(个体理性及群体理性的夏普利值及 AL 值)。
间距控制策略与分析
采用经典跟车模型,将车辆的时滞和非线性环节简化为一阶惯性环节。
构建了车辆队列纵向协同控制数值仿真模型。以合作博弈策略中的关键参数为变量,对基于仿真运动规则的普通间距控制策略(Boid),夏普利值以及平均字典序等多种策略进行了仿真。
基于非合作博弈的队列行为决策算法
以队列及队列外车辆存在路权冲突的并道工况为例,分析了队列及队列外车辆进行非合作博弈问题的组成结构。
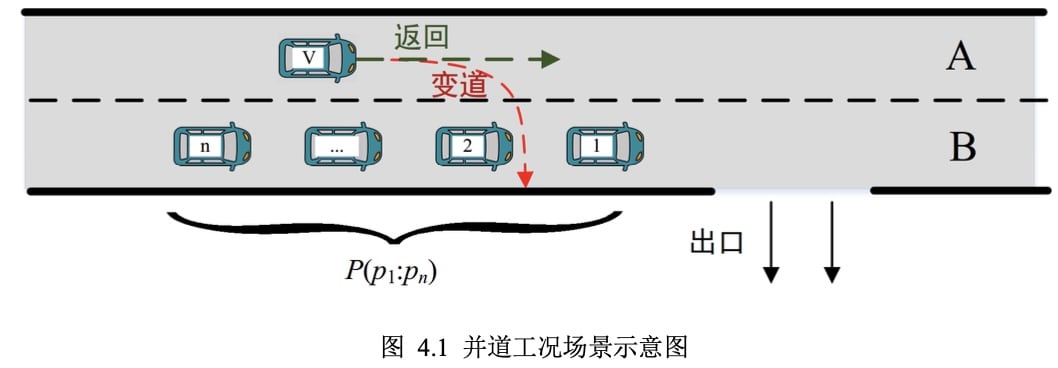
队列非合作博弈结构
二维多车协同问题被转化为非合作博弈问题,博弈的最终结果受限于博弈双方的成本函数,而成本函数是关于博弈双方加速度的策略依赖型函数。
队列外完全信息动态博弈
假设并道车辆及队列外车辆利用通讯或云端可以获取对方成本函数时,该非合作博弈场景为完全信息动态博弈。
证明了纳什均衡的存在,进行了完全信息动态博弈算法在影响参数在不同取值下 的效果进行了仿真及对比。
队列外不完全信息动态博弈
无法直接构建联合策略收益矩阵时,多车协同变道属于不完全信息博弈。
给出了车辆队列与其它车辆进行不完全信息博弈时的贝叶斯纳 什均衡的解释。
对信念池更新进行了算法验证,并模拟了车辆与队列的之间的竞争博弈活动。
仿真验证与分析
结合车辆队列实际驾驶场景构建了车辆队列硬件在环及联合仿真平台, 然后分别对一维,二维场景下的典型工况进行了算法验证,对车辆队列及队列外车辆 分布式决策方法的协同效果进行了研究。
