Fundamental diagram and stability analysis for heterogeneous traffic flow considering human-driven vehicle driver’s acceptance of cooperative adaptive cruise control vehicles
Beijing Key Laboratory of Traffic Engineering; Faculty of Architecture, Civil and Transportation Engineering; Beijing University of
Technology, Beijing 100124, PR China
Abstract
Topic: the effect of the differences in acceptance of CACC by HV drivers on the heterogeneous traffic flow.
Content: capacity and stability of the heterogeneous traffic flow under different CACC penetration rates
Intro
However, the relevant report demonstrates until 2045, the penetration rates of CACC on roads could only reach 24.8% [8],
which shows that the mixed driving of traffic flow of CACC and HV will exist for a more extended period during the popularization of CACC.
Researchers assumed the behavior of HV following CACC is consistent with that of HV homogeneous traffic flow but ignored human factors of HV drivers.
Questionnair
……
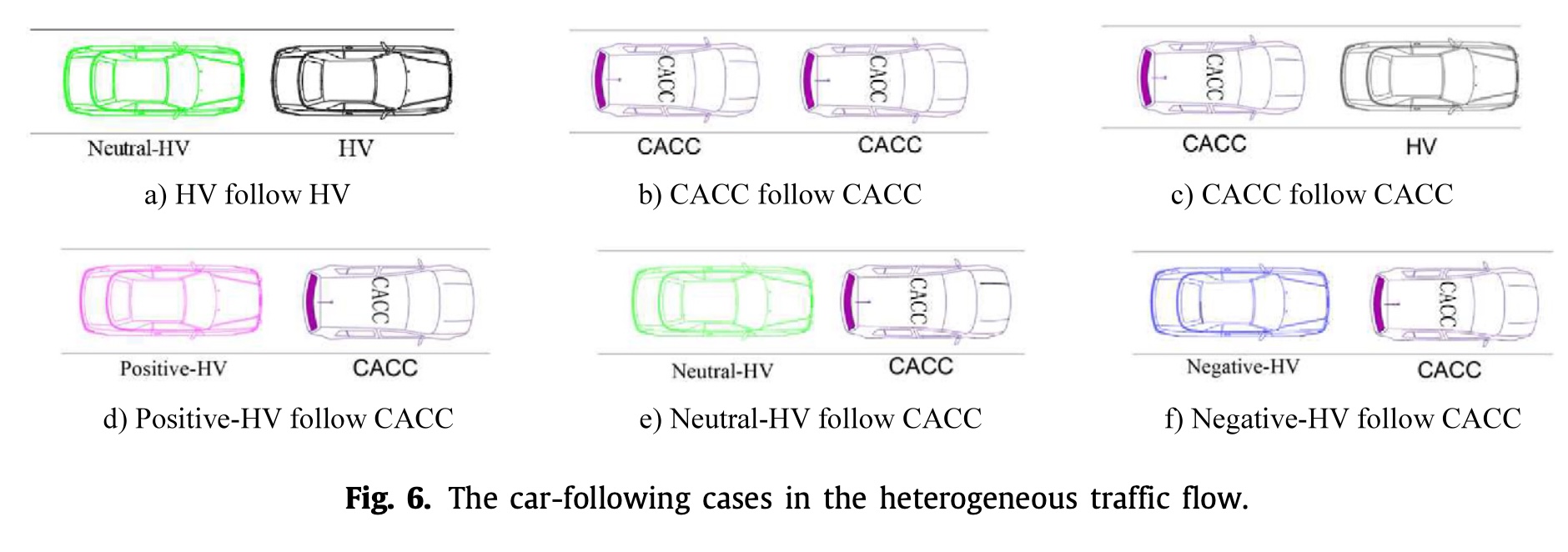
Car-following rule and model analysis
Vehicle composition rule of the heterogeneous traffic flow
Suppose CACC penetration rate is PC (0,1). Then the probability of HV is PH=1−PC , where the proportions of three types of HV: positive-HV, neutral-HV, and negative-HV, are Ppos,Pneu,andPneg, respectively.
Considering PH=1−PC=Ppos+Pneu+Pneg , when the number of vehicles in the lane is N, the expected number of various types of vehicles
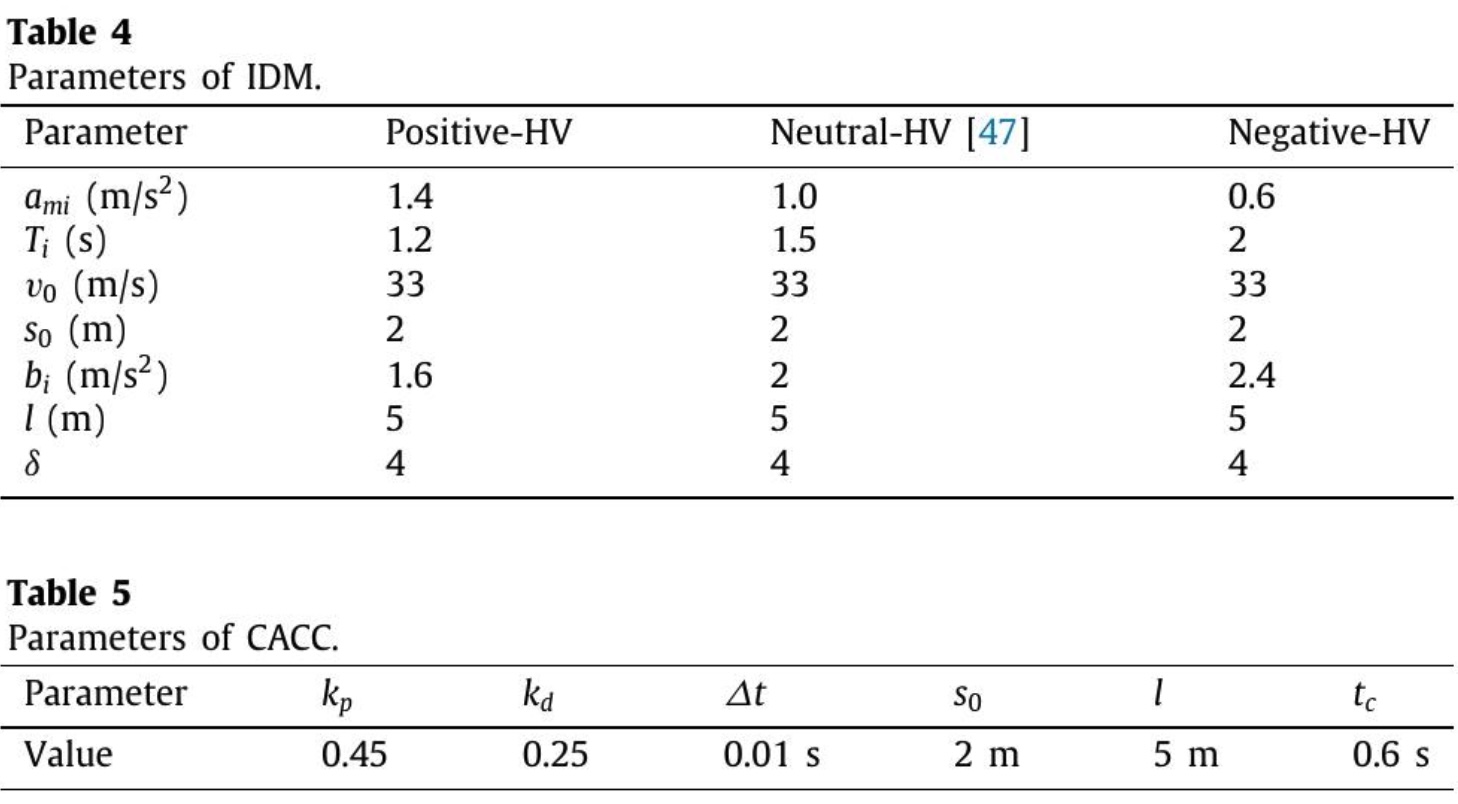
ami is the maximum acceleration of class i of HV,v0 is the free flow speed,
s∗ is the desire safety distance, s0 is the minimum safety distance at a standstill
Ti is the safe time headway of class i of HV,bi is the desired deceleration of class i of HV,hn(t) is the space headway difference between the n-1th vehicle and the nth vehicle at moment t,
然后使用文献中的数据来校准HV 的参数
determines the value range of parameters in the analysis of the real vehicle driving data in the literature [50],
the reference of the car-following model parameters of drivers with different personalities calibrated in literature [40,48], fosters the determination of various driver model parameters in this paper in Table 4.
en(t) is the error between the actual space headway and the desired space headway of the vehicle n at time t,e˙n(t) is the differential of en(t),tc is the headway that CACC expects to maintain, kp and kd are the control error parameters. The values of the coefficients are determined in the results of the real vehicle calibration in California PATH in Table 5 [18].
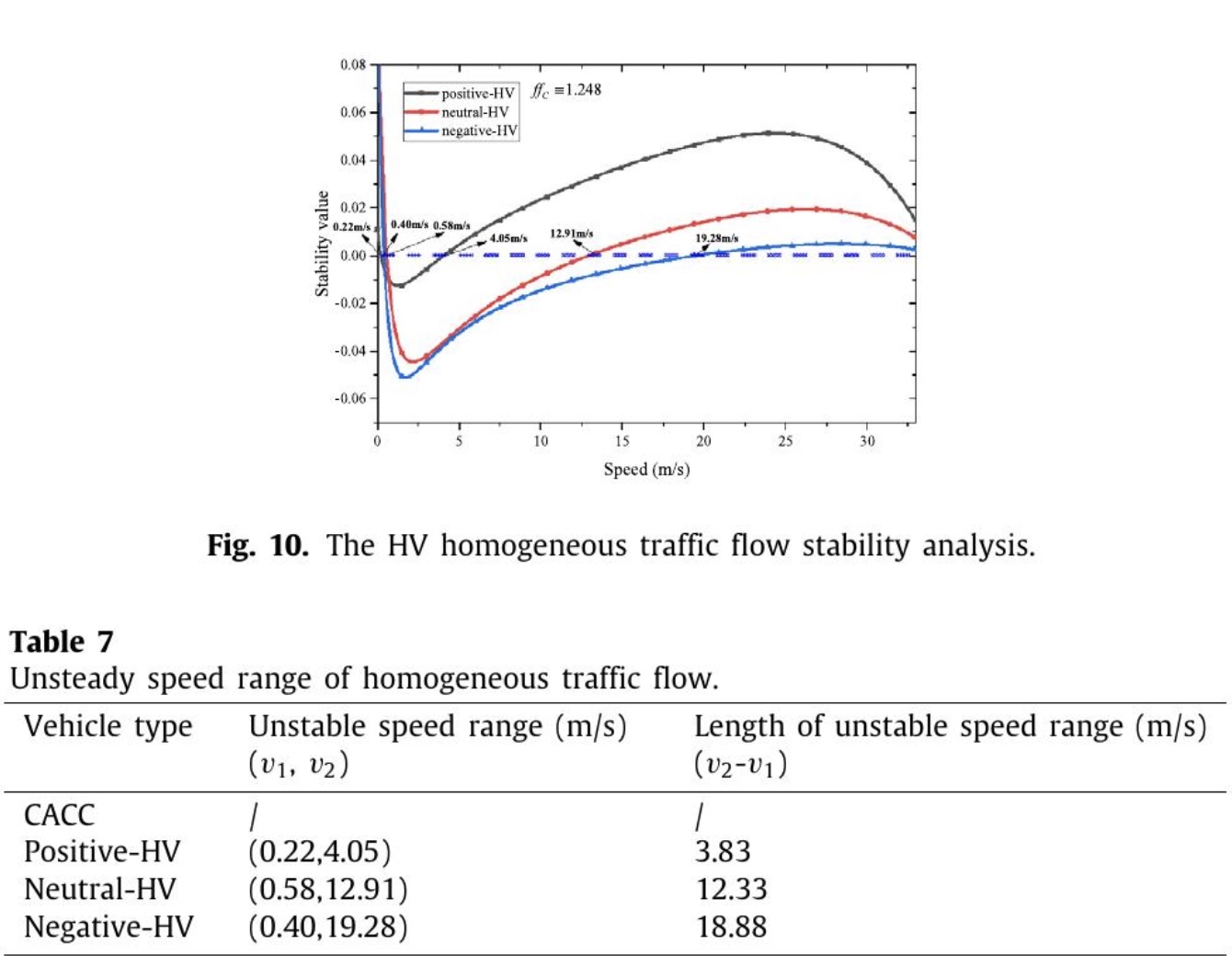
With the decrease of stability, when the same degree of traffic disturbance occurs, the disturbance amplitude, propagation range, and duration of the disturbance increase, in turn resulting in traffic congestion [54]. Starting from the general structure of the car-following model, this section constructs the analytical framework of the heterogeneous traffic flow stability.
Traffic flow stability analysis framework
the unstable discriminant condition of the heterogeneous traffic flow: