Fundamental diagram and stability of mixed traffic flow considering platoon size and intensity of connected automated vehicles
from Physica A
Zhihong Yao a,b,c, Qiufan Gu a, Yangsheng Jiang a,b,c,∗, Bin Ran d
Abstract
对异质交通流的数学建模,贡献
(1) a greater platoon size leads to the increase of traffic capacity while it is harmful to the maintenance of traffic flow stability;
(2) the platoon size is recommended to be set at 4 to 6 to balance the relationship between traffic capacity and stability;
(3) a more significant platoon intensity can help improve the traffic capacity and stability;
(4) the penetration rate of CAVs has a positive effect on the traffic flow stability until it increases to a certain degree.
Intro
However, CVs strongly depend on a high penetration rate, and AVs cannot predict the driving behavior of multiple vehicles ahead [6,7].
Mixed traffic flow model
T=[tAAtHAtAHtHH]
tAH(PA,PI)=Pr(An+1=HDV∣An=CAV)={PH(1−PI),PH+PI(PH−min{1,PAPH}),PI≥0PI<0,tAA(PA,PI)=Pr(An+1=CAV∣An=CAV)=1−tAH(PA,PI),
tHA(PA,PI)tHH(PA,PI)=Pr(An+1=CAV∣An=HDV)={PA(1−PI),PA+PI(PA−min{1,PHPA}),PI≥0PI<0,=Pr(An+1=HDV∣An=HDV)=1−tHA(PA,PI).
Cooperative adaptive cruise control mode
{vn(t+Δt)=vn(t)+kpen(t+Δt)+kde˙n(t+Δt)en(t+Δt)=xn−1(t)−xn(t)−l−S0−TAA−intra vn(t).
an(t)=Δt+kdTAA_intrakp(Δxn(t)−l−S0−TAA_intra vn(t))+kdΔvn(t)
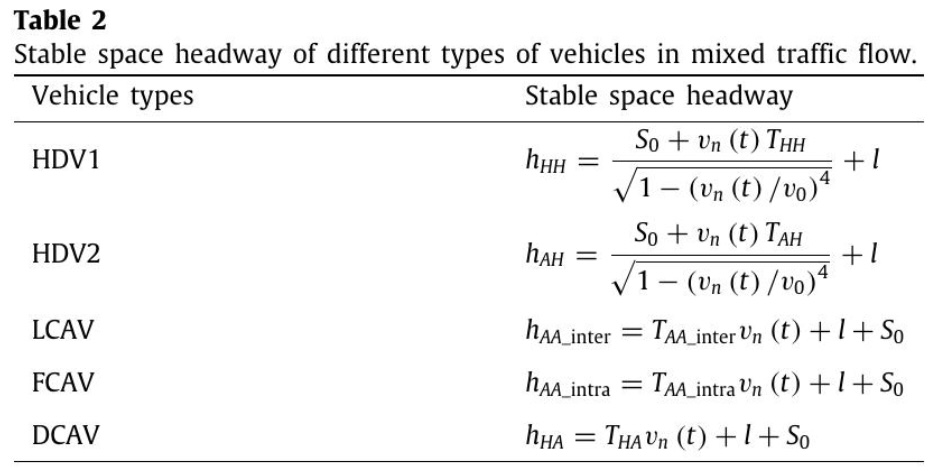
Fundamental diagram
In a word, the space headway in the mixed traffic flow steady state depends on the vehicle types.
