基于 SUMO 软件的异构交通流仿真平台车辆模型开发与集成
同济大学学报(自然科学版)第49 卷第7期 2021年7月 侯德藻1,高兰达1,钱振伟2,李振华1,李一丁1
摘要
What
-
实车参数+实际道路 -(优化)-> SUMO 车辆模型
-
构建高保真车辆运行特性模型(自动驾驶全工况测试能力)
-
与 SUMO 软件交通流仿真集成,
需求分析和基础软件比选
对于人工驾驶与自动驾驶混合所构成的异构交通流,其驾驶行为、驾驶安全和驾驶效率的评价仍然难以实现。针对异构交通流路网仿真缺少验证工具。
why sumo?
SUMO 软件是一个微观的、空间上连续、时间上离散的交通仿真软件,具备开源特性,并支持 C++的 二次开发。
SUMO 软件平台问题分析
Sumo 中的三种速度计算方法:
- 带驾驶员熟练参数的随机加速
- 一阶迟滞法,模拟意识迟滞性
- 后向动力学,考虑发动机力矩
过于简单,无法满足仿真平台研究的需求
SUMO 软件本身的横向控制方式有 2 种:
- 瞬间变道
- 恒定车速变道。
基于 SUMO 软件的车辆模型构建
车辆模型需要包含丰富的部件模型, 主要部件模型包括转向系统模型、车体动力学模型、 悬架系统模型、制动系统模型、轮胎模型、道路模型、 驾驶员模型、车辆空气阻力模型、简单动力系统模 型、底盘以及辅助驾驶系统相关软控制器模型等。
但是太复杂了做不了:
只做纵向和横向两个控制机构。
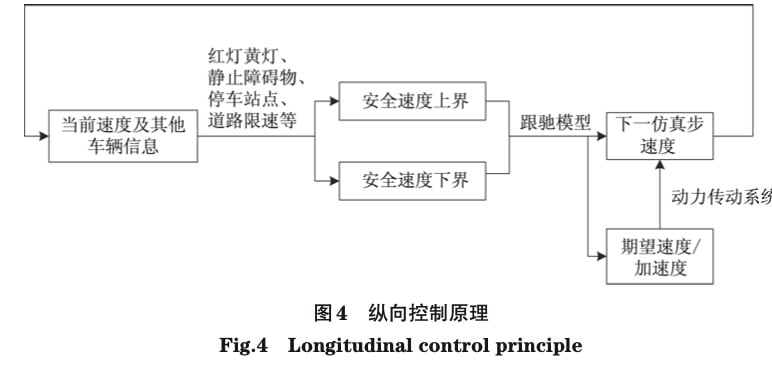
车辆纵向动力学模型
动力系统、制动系统、单轨系统 -(IO 共享数据接口)-> 车辆纵向动力学模型
在每一个计算步长,向动力系统输入加速踏板开度、当前车速信息,动力系统将驱动扭矩输出到 I/O 共享数据,制动系统同理。
通过计算得到的扭矩获得加速度,用以更新车速,查表方式不仅能够有效地模拟具体的实车表现, 还可提升计算效率。
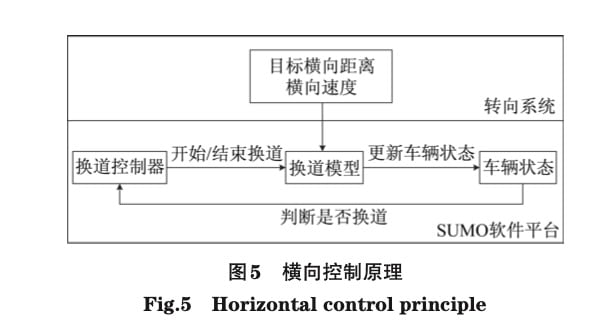
车辆横向运动学模型
通过输入方向盘转角,由 Map 图查找横拉杆位移,再由横 拉杆位移 Map 图查找左右前轮的车轮转角。由车辆 当前速度乘以车轮转角的正弦值,得到车辆的横向速度
横向速度通过前轮转角更新,而前轮转角与动力系统类似, 通过方向盘 Steer 对应的查表值得到。
横向控制采用 PID 方向盘转角控制系统,以换道的完成程度作为误差量,对方向盘转角进行 PID 调节
当换道即将结束时,ea ( k ) 越来越小,导致方向盘转角过小,使得换道过程需较长时间结束。驾驶员驾驶车辆时,存在一定的操纵误差,离该车道的道 路中心线会有一定程度的偏离。为解决上述问题, 设定:当 C>0. 9 时,即认为换道完成。
可以看出,优化后车辆模型速度和加速度变 化平缓,尤其加速度控制更加接近实际驾驶状态。
数据标定和微调:
自研的 ModelBase 仿真软件实现模型对标。
通过分类整理实车试验数据,提取关键输入和输出数据作为对标对象;调试车辆模型,将模型仿真结果和试验数据进行对标,并反馈优化模型,从而保证控制逻辑和控制特性与真实的控制系统控制效果保持一致。
50 km·h−1 和 100 km·h−1 下空载和满载 2 种状态,采用踏板行程下的制动减速度以及紧急制动下的速度和加速度数据对车辆模型进行对标。不断记录和优化对标值优化车辆模型。
结论
通过平台验证发现,相比 SUMO 软件默认车辆模型,优化后车辆模型在控制 效果方面更接近实际驾驶状态。该优化平台可以支 撑异构交通中驾驶行为和交通流安全评价研究。异 构交通具有群体性,路网的仿真验证需要仿真平台 能够支撑几百辆车的运行,对平台载体的计算能力 要求较高,如何平衡和优化计算能力,是未来仿真平 台需要解决的问题。
