车辆队列间协同换道控制策略
by 李姗 from 清华大学 硕士毕业论文 2017
摘要
-
车车通信的,针对队列的拆分、重组、合并及队列间换道的研究(高速公路行驶的两个车辆队列)
-
基于 换道场景分类 的总体控制构架:
- 自由车辆进入队列
- 两队列间单车换道
- 两队列间多车同时换道
- 两个队列合并
-
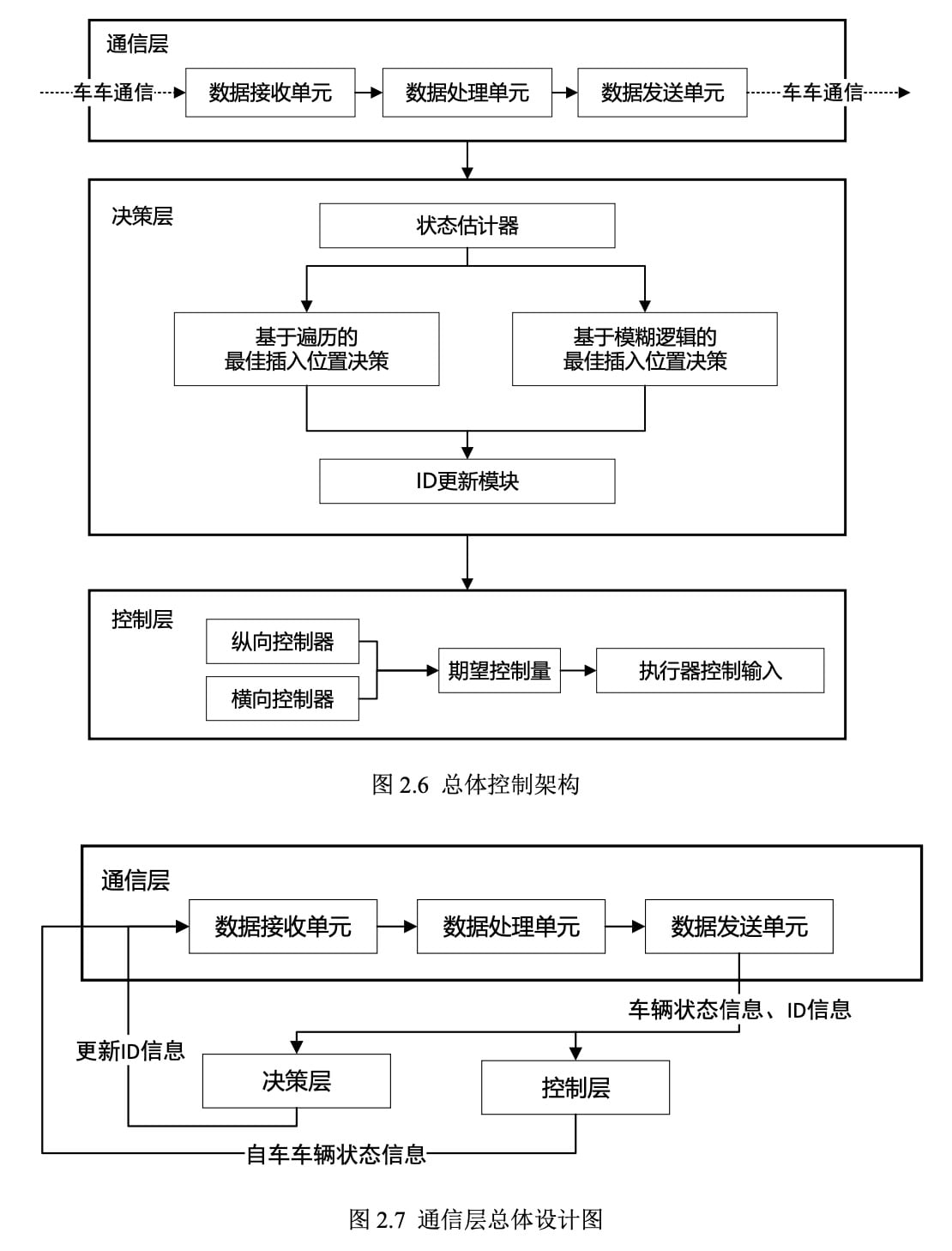
分层式协同换道控制架构:
- 通信层:传递的信息,通信网络的拓扑结构,时延和丢包各个层之间的传递过程
- 决策层:换道车辆最佳插入位置决策算法(遍历+模糊),队列车辆 ID 更新策略
- 控制层:纵横向运动解耦控制策略
-
基于 MATLAB/Simulink 和 Prescan 的联合仿真平台:能确保通信网络存在一定时延情况下车辆队列间的协同换道。
相关研究
目前对协同换道没有一个统一、明确的概念:
- 换道车辆的目标车道后车在换道过程中减速运动配合换道的行为当作协同换道
- 主线车辆通过减速或变更车道从而让行于支线汇入车辆的行为
协同换道主要在两个方面:
- 针对多车道 的协同换道
- 被换入车道车辆对换道车的配合
- 不同换道车辆之 间的协同,
- 针对合流区的协同换道控制策略
队列间协同换道控制架构
场景分类
自由单车入队,两个车队单车换道,一个队列中同时有多车换道|两个队列分别有车辆换道,两个队列合并。
总体控制架构
集中式+分布式相结合,头车为决策中心,每辆车采用分布式控制。
- 所有车辆都是可控且具备车车通信功能的。
- GPS 等传感器认为是理想的,即发送的信息,如位置、速度、加速度等都 是车辆实际的位置、速度、加速度,没有测量误差。
- 每辆车都可以广播自己的信息或者向指定 IP 发送信息,假设所有车辆都在通信范围内,但数据发送并不是理想状态,考虑有时延和丢包等问题。
- 队列 ID 是车辆队列中每辆车唯一的身份标识,只有队列头车掌握队列 ID 分配和更新的权限。
-
头车管理入队请求,获取车队信息,计算最佳入队位置。
-
每个节点有自己的分布式控制器,分为纵向和横向控制。

通信层设计
将车辆的经纬度信息转化成直角坐标系坐标,可以根据地图信息得到自车所在车道、车道宽度、车辆与车道中线的夹角等数据。
车辆队列的行为划分为:
- 常规性行为:分布式,让队列中的车保持相同的车速及合适的车距。由每辆车自身根据获得的他车信息进行控制。
- 任务性行为:集中式,主要包括队列中车辆的换道、合并等行为,则 由头车负责协调和管理。当有车想要入队时,头车分配给入队车一个队列 ID,同时通过广播更新队列成员的静态信息。
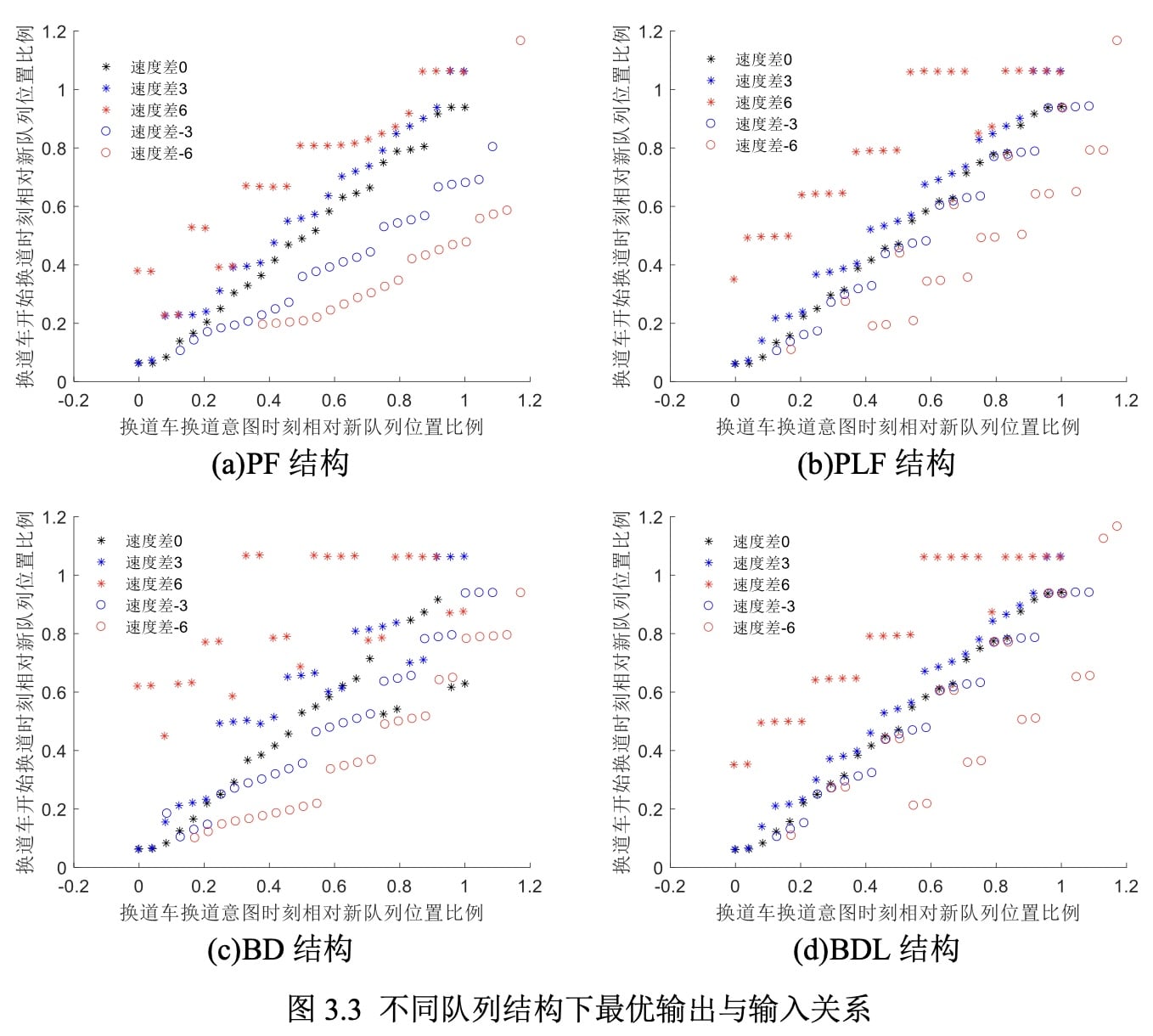
四种通信拓扑结构:
- 前车跟随式 (predecessor following,PF)
- 双向跟随式(bidirectional,BD)
- 前车-领航者跟随 式(predecessor-leader following,PLF)
- 双向-领航者跟随式(bidirectional-leader following,BDL)
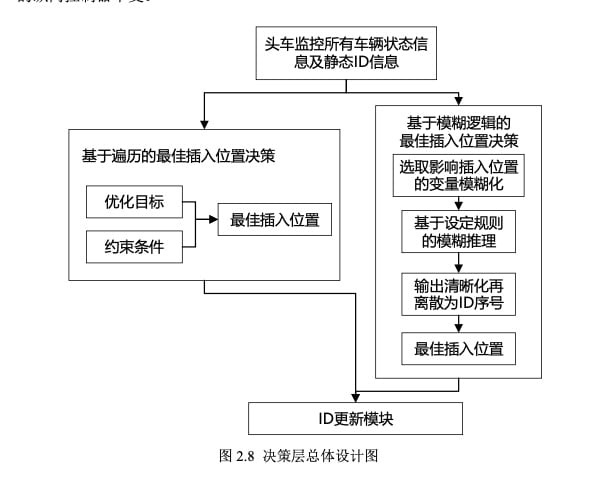
协同换道决策层
状态估计器
头车时刻估计队列中每辆车的状态,并根据接收到的实际信息及时修正估计信息,建立车辆的纵向动力学模型,得到其状态空间方程。
使用反馈线性化技术让非线性模型线性化,得到的车辆信息用来更新状态方程,没有收到信息则使用估计的数据。
基于遍历的最佳插入位置决策
通过遍历每一个插入位置,找出可以保证安全换道并使得队列最快稳 定的插入位置。该方法适用于仅有一辆车想要换道。
基于模糊逻辑的最佳插入位置决策
多车道让遍历的计算成本大大增加。
Zadeh(模糊集合),Mamdani 模型,依赖于模糊变量的隶属度函数和模糊规则
经过仿真分析,确定了影响插入位置的两个主要因素是两个队列的速度差(06m/s )以 及想换道车辆在它想要进入队列的相对位置(01),作为模糊化的变量。
根据不同换道场景设计的知识库,由两个部分形成:
-
数据库
速度:分为 NB(负大)、NS(负小)、ZE(零)、PS(正小)、PB(正大), 隶属度函数的形状为三角形。
想要进入队列的相对位置:很小、小、中、大、很大,范围在 0~1 之间。
-
规则库
if-then 型条件句,不同队列结构(PF、PLF、BD、BDL):
模糊规则
输入1 (速度差) 输入2 (在新队列位置比例) 输出 (PF) 输出 (PLF) 输出 (BD) 输出 (BDL) 负大 很小 负大 负小 负小 负小 负大 小 负大 负小 负小 负小 负大 中 负大 负大 负大 负大 负大 大 负大 负大 负大 负大 负大 很大 负大 负大 负大 负大 负小 很小 零 零 零 零 负小 小 零 零 零 零 负小 中 负小 零 负小 零 负小 大 负小 零 负小 负小 负小 很大 负小 零 负小 负小 零 很小/小/中/大/很大 零 零 零 零 正小 很小 零 正小 零 零 正小 小 零 零 正小 零 正小 中 零 零 零 零 正小 大 零 零 正小 零 正小 很大 零 零 正小 零 正大 很小 正大 正大 正大 正大 正大 小 正大 正大 正大 正大 正大 中 正大 正大 正大 正大 正大 大 正小 正大 正大 正大 正大 很大 正小 正大 正大 正大
协同换道层设计
要求:所有车辆保持相同的速度,以及车间距保持一致。
纵向
每个节点都有自己的纵向线性控制器,利用邻域信息进行控制。
针对四种通信拓扑(PF,PLF 和 BD,BDL)分别给出了信息流拓扑结构下的节点 i 的邻域和可达性集合。
横向
先判断是否达到换道条件,换道轨迹采用五次多项式,轨迹跟踪采用PID。
仿真验证
Prescan 和 MATLAB/Simunlink ,设计了大量工况进行统计分析,对比四种通信拓扑情况的优劣。
terminology
模糊逻辑
模糊逻辑的简介:https://zhuanlan.zhihu.com/p/31458221
模糊系统作为一种万能逼近器能够在封闭有界定义域内上以任意精度逼近任意的非线性系统;
matlab 模糊逻辑模块的嵌入式运用:https://zhuanlan.zhihu.com/p/576037048
Zadeh的功与过:“纪念模糊集之父Zadeh教授”中国学者研讨会:https://blog.sciencenet.cn/blog-2999994-1086073.html
Kalman told me many times about his uphill battles. His first paper on Kalman filtering was rejected, and he repeatedly came back to this fact. Instead he had to publish in a less prestigious mechanical engineering journal. This and similar events colored his view of the scientific community and his own place in it
模糊化PID是什么?模糊规则如何制定?
https://www.zhihu.com/question/61819093
传统控制为动态系统的控制器构造提供了多种方法。
- 比例积分微分(PID)控制:今天运行的控制器中有90%以上是PID控制器(或者至少是某种形式的PID控制器,如P或PI控制器)。这种方法通常被认为是简单、可靠和易于理解的。通常,就像模糊控制器一样,启发式算法被用来调优PID控制器(例如Zeigler-Nichols调优规则)。
- 经典控制:超前滞后补偿、Bode和Nyquist方法、根轨迹设计等。
- 状态空间方法:状态反馈、观测器等
- 最优控制:线性二次型调节器,采用Pontryagin最小原理或动态规划等。
- 鲁棒控制: 或 方法,定量反馈理论,环路成形等。
- 非线性方法:反馈线性化、李雅普诺夫再设计、滑模控制、反步等。
- 自适应控制:模型参考自适应控制、自校正调节器、非线性自适应控制等。
- 随机控制:最小方差控制、线性二次高斯(LQG)控制、随机自适应控制等。
- 离散事件系统:Petri网、监督控制、无穷小扰动分析等。
