Cooperative Highway Lane Merge of Connected Vehicles Using Nonlinear Model Predictive Optimal Controller
by Syed A. Hussain 1 , Babak Shahian Jahromi 2 and Sabri Cetin 2,*
from vehicles 2020
Abstract
从 direct multiple shooting method 得来的cooperative Nonlinear Model Predictive Control (NMPC)-based optimization method 被用于两辆相连车的高速公路换道。
只有模拟结果。
Intro
纵向控制主要控制加速度和前车距离,视觉、雷达、V2V但是要处理信号延迟、故障相关的问题。
横向主要针对方向盘转向角,不仅要考虑当前车道,还要考虑变道对象的车道。
最小化整体制动诱导车道(Minimizing Overall Braking Induced,MOBIL)是一种更高级别的横向战略控制,可评估强制和可选车道变更期间变更车道所需的规则,in :
Kesting, A.; Treiber, M.; Helbing, D. General Lane-Changing Model MOBIL for Car-Following Models.
Transp. Res. Rec. J. Transp. Res. Board 2007, 1999, 86–94. [CrossRef]
加速度最好符合梯形曲线,需要留足变道过渡时间& 保持驾驶员的舒适度。
针对多车道高速公路探索了最优公式和贝叶斯网络中的遗传算法,以增加高速公路的吞吐量in
Kim, K.; Cho, D.i.; Medanic, J.V. Lane assignment using a genetic algorithm in the automated highway systems. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 16 September 2005; pp. 540–545.
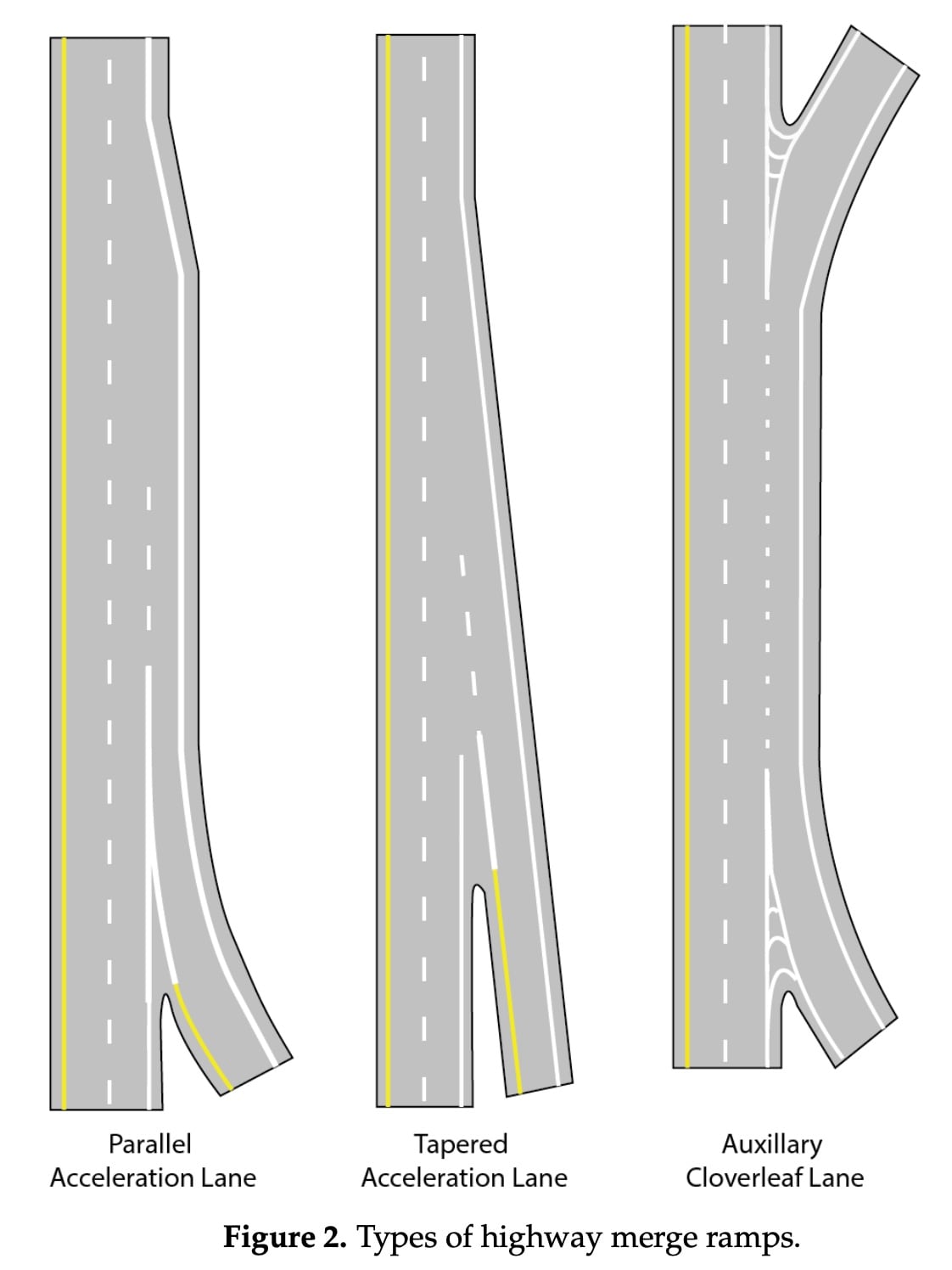
Highway Merge Problem
美国三种类型的高速公路车道合并配置:1)平行加速车道,2)锥形加速车道,3)辅助三叶草车道
| Rios-Torres, J.; Malikopoulos, A.A. A Survey on the Coordination of Connected and Automated Vehicles at Intersections and Merging at Highway On-Ramps. IEEE Trans. Intell. Transp. Syst. 2016, 1066–1077.[CrossRef] | 介绍了通过V2I 来提高变道安全性和效率的研究。 |
|---|---|
| Rios-Torres, J.; Malikopoulos, A.A. A Survey on the Coordination of Connected and Automated Vehiclesat Intersections and Merging at Highway On-Ramps. IEEE Trans. Intell. Transp. Syst. 2016, 1066–1077. | 建议的基于 MPC 的合并优化搜索高速公路主车道上一个车队的空隙 |
| Kachroo, P.; Li, Z. Vehicle merging control design for an automated highway system. In Proceedings ofthe IEEE Conference on Intelligent Transportation System, ITSC’97. Boston, MA, USA, 12 November 1997;pp. 224–229. | 在优化程序中使用了合作行为 |
| Cao, W.; Mukai, M.; Kawabe, T.; Nishira, H.; Fujiki, N. Gap Selection and Path Generation during MergingManeuver of Automobile Using Real-Time Optimization. SICE J. Control. Meas. Syst. Integr. 2014, 7, 227–23 | 同上 |
双车协同变道
车道动力学模型
只有两个车,leading(h)和 merge (m),假设:
- 使用融合传感器确定自车以及其他车辆的位置
- 在MPC 优化期间使用动力学模型来预测未来车辆系统
- 做出转向、加速和制动的控制决策,以使控制目标最小化并满足约束条
h: ,位置,转向角,速度,m:,加速度和转向角
非线性MPC
Direct Multiple Shooting Method
👉看这个【三种最优控制Single/Multiple shooting, collocation method总结】https://zhuanlan.zhihu.com/p/396056002
Comparison between direct and indirect method
| Indirect method | Direct method | |
|---|---|---|
| Solution Scheme | First optimize, then discretize (e.g. Pontryagin (PMP)) | First discretize, then optimize (transfer the infinite problem into finite- dimensional Nonlinear Programming problem (NLP), and solve NLP) |
| Pros | 1. Boundary value problem with only 2n_x ODE 2. can treat large scale systems | 1. can use state-of-the-art methods for NLP solution 2. can treat inequality constraints and multipoint constraints much easier |
| Cons | 1. only necessary conditions for local optimality 2. Need explicit expression for control u*(t), singular arcs difficult to treat 3. ODE(常微分方程,Ordinary differential equation ) is strongly nonlinear and unstable 4. inequalities lead to ODE with state-dependent switches | 1. obtain only suboptimal/approximate solution |
| Applications | optimal control e.g. in satellite orbit planning at CNES(法國國家太空研究中心) | most commonly used nowadays due to their easy applicability and robustness |
The shooting method (single/multiple) 就是将 boundary value problem 变化为 a series of initial value problems (BVP --> IVP)
