A Novel Path Planning Algorithm for Truck Platooning Using V2V Communication
Lee Y, Ahn T, Lee C, et al. A novel path planning algorithm for truck platooning using V2V communication[J]. Sensors, 2020, 20(24): 7022.
Abstract
-
background
卡车编队(articulated cargo trucks)行驶中,前车(leading vehicle)由人工驾驶,后车(following vehicles)由自主驾驶行驶,卡车之间的车距较短。每辆卡车都必须保持动态稳定性,此外,整个系统必须保持串稳定性(string stability)。
-
challenge
- 后车的前视范围(front-view range)较短,路径规划能力受损,容易在弯道跑偏(off-tracking phenomenon)
- 在不了解全局坐标系的情况下, 很难关联每个车的局部坐标系 it is difficult to correlate the local coordinate systems ( that each truck relies on for sensing environment and dynamic signals )
-
solution
开发了一种用于铰接式货车列队行驶的路径规划算法:
使用卡尔曼滤波器、V2V(车对车)通信和一种新颖的更新和转换方法,每个跟随车辆都可以计算出领先车辆前部的轨迹,并将其用作目标路径。
intro
后车使用雷达、摄像头等环境传感器感知前方车辆和车道,通过车辆纵向和横向控制进行自动驾驶。
不用GPS:稳定性,隧道遮挡。
大型车队长度可达100m,但是一个编队限定在3~4 辆车保证灵活性和安全性。
后车纵向(longitudinal)控制:
使用较为成熟的ACC 算法,保持纵向控制较短的距离(空气动力学考量,节油)
- 摄像机的前视范围受到前面卡车的严重限制
后车横向(lateral)控制:
使用摄像头,旨在跟随前车的行驶路径,同时保持在自己的车道上。
-
直接跟车(direct vehicle-following):
后车用与前车相对纵向和横向距离进行操作,基于几何原理计算转向角。主车(subject vehicle)重心(CG)和前车后部中心(rear center)之间的相对位置和相对角度,可以用来计算其到前车后部的虚拟弯曲路径。
缺陷:
- 用的是前车后方的相对位置信息,而不是前车方向盘的轨迹,所以在转弯时可能会出现在前车实际轨迹内行驶(inside the actual trajectory of the preceding vehicle)的问题。
- 在小曲率高速公路行驶时,由于与前车的相对横摆角(yaw angle)很小,如果感知精度低/测量分辨率小,则无法保证跟随前车虚拟弯曲路径的可靠性。
-
车辆路径跟随(path-following):
前车的轨迹:本车的运动参数+存储前车后部位置坐标。
缺陷:
- 由于编队行驶时车辆间距离较短,因此存在无法在高速获得足够前视距离的问题。
- 如果是半挂卡车(semi-trailer truck),在转向过程中,跑偏(Off-tracking)现象,即牵引车的转向轴和拖车后部保险杠之间的路径不同,会导致在跟随前车时出现跟踪错误。
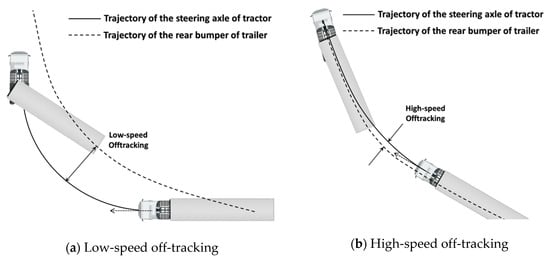
克服跑偏问题:后车需要用前车的牵引车而不是拖车的轨迹来确定自己的目标路径。
使用摄像头/雷达融合数据、IVN(车载网络)底盘信号和 V2V 通信,计算出 LV 拖车头(tractor)位置的轨迹,用作自己的目标路径。
System Architecture
车的各种参数:
……
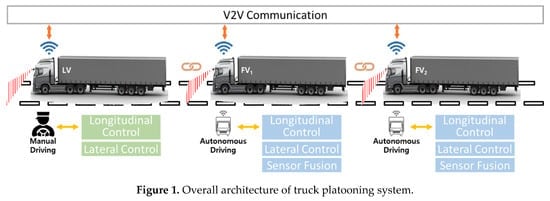
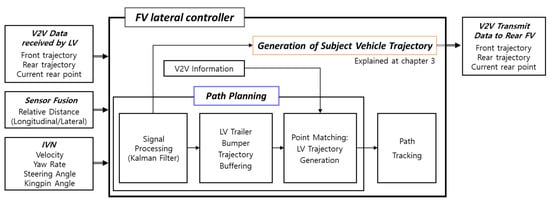
Overall architecture of truck platooning lateral controller.
All vehicles participating in the fleet perform V2V communication among each other using DSRC/802.11p WAVE (Wireless Access in Vehicular Environment) protocol
前车创建其驱动轨迹,通过V2V 通信传给后车,后车执行路径规划。
需要估计无法测量的横向速度(卡尔曼滤波器)+ 本地坐标系转换 (点匹配,point matching)
Vehicle State Estimation by Kalman Filter
在以往的研究中,由于无法测量车辆的横向速度,因此仅考虑横向速度较小的一般高速公路行驶场景,并假设横向速度为零。
运动学方程……
卡尔曼滤波器,设计为每 10 ms 估计一次状态.
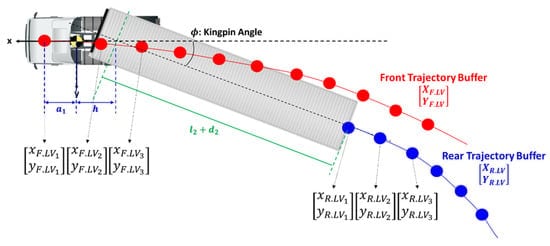
路径规划算法中,前车必须生成自己的驾驶轨迹,使后车可以创建其目标路径。该轨迹分别由前后两个部分组成,各自保存300样本在FIFO 的pipline 缓存中。
Proposed Path Planning Algorithm
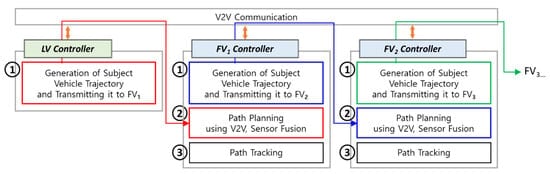
后车路径规划框架:
挑战在于没有全局坐标概念的情况下将LV viewpoint 的坐标系统转换成 FV 的。
两个数据集P和Q之间的点匹配方法:
首先,分别从P和Q中选择一个参考点。 它们必须代表相同二维形状中的相同点。 根据它们位置的不同,可以找到一个平移向量,并相应地平移 Q 中的所有点。 最后找到使P和Q重合的旋转矩阵。
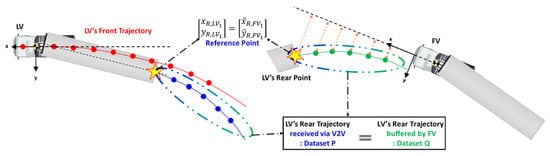
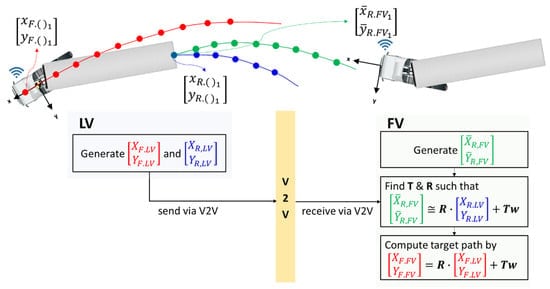
后车能看到后保险杠,前车发送tractor 中心坐标,由此计算(Kabsch算法)转移坐标。
Results of Simulation and Road Test Experiments
整个实验包括仿真和实际测试两部分,其中仿真基于TruckSim和Matlab/Simulink,实际部分在高速进行,长度7.7公里。
模拟的结果是越往后的车辆由于卡尔曼滤波器的误差,其规划值逐渐偏离真值。
真实路测的结果显示,卡车对小坡度非常敏感,会导致横向位移偏差。本框架对于前车的随机扰动也有良好的修正能力。
