Cooperative Automated Vehicles: a Review of Opportunities and Challenges in Socially Intelligent Vehicles Beyond Networking
by Loke S W. from IEEE Transactions on Intelligent Vehicles, 2019, 4(4): 509-518.
Abstract
我们研究了自动驾驶车辆合作的必要性(在社会-网络-物理环境中互动),包括合作将解决的问题,以及议题和挑战。
本文旨在概述 CAV 中的合作层,突出合作 CAV 的潜在应用和问题,借鉴相关工作。 我们首先描述了可以进行合作的一系列场景以及潜在的好处,然后概述了启用 CAV 社交大脑 (social brain)的挑战。
Intro
Connected automated vehicles (CAVs),forming the so called Internet of Vehicles
Cooperative Intelligent Transport Systems (e.g., cooperative driving) is an active area of research
over Dedicated Short Range Networking (DSRC) or 5G-V2X networking
- The Society of Automotive Engineers (SAE) released a message set dictionary for standardizing messages exchanged in DSRC communications, such as intersection collision warnings, emergency vehicle alerts and vehicle status information can be shared.
- The European Telecommunication Standard Institute (ETSI) provided the EN 302 637-2 standard which defined Cooperative Awareness Messages (CAMs).
Riener 和 Ferscha [7] 提出了车辆具有可以协商、合作和协作的社交能力的概念 (social brain)
- 社交大脑可以针对不同的道路情况实施多种合作协议,例如,交叉路口碰撞警告协议、环形交叉路口移动协议、合并交通协议、在道路上编队行驶协议 高速公路、超车协议、汽车在十字路口让路的协议等等。
types of cooperation
We consider below two types of cooperation: 1. vehicle-to-vehicle 2.vehicle-to-pedestrian.
A. Vehicle-to-Vehicle Cooperation and Reasoning
-
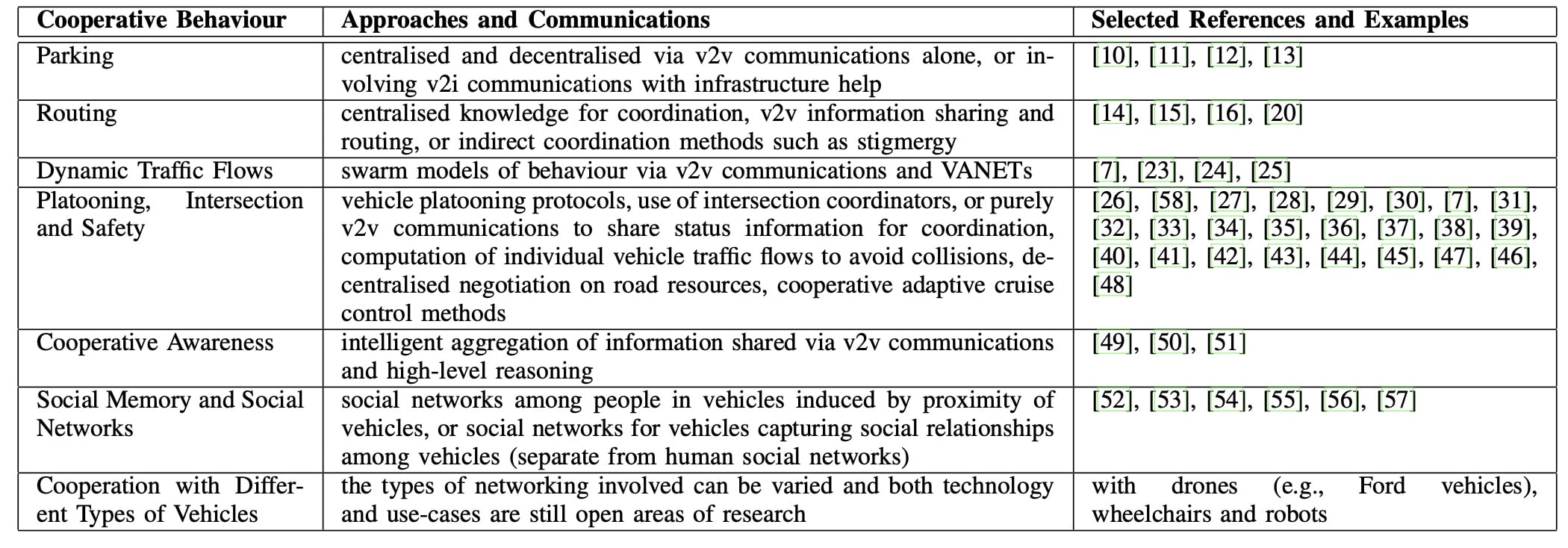
Parking:the use of inter-vehicle cooperation in finding parking spaces
-
Evangelia Kokolaki, Merkouris Karaliopoulos, and Ioannis Stavrakakis. Opportunistically assisted parking service discovery: Now it helps, now it does not. Pervasive Mob. Comput., 8(2):210–227, April 2012.分析车辆通过收集和共享停车信息 v.s 集中管理 寻找停车位的性能:
- there is no optimal solution for all situations
- the benefit of sharing information can overweight the increased vehicle competition that it may cause
-
G. Tasseron, K. Martens, and R. van der Heijden. The potential impact of vehicle-to-vehicle communication on on-street parking under heterogeneous conditions. IEEE Intelligent Transportation Systems Magazine, 8(2):33–42, Summer 2016.在车辆之间传播停车信息几乎不会减少搜索时间,甚至偶尔会增加搜索时间
-
A. Aliedani, S. W. Loke, A. Desai, and P. Desai. Investigating vehicleto-vehicle communication for cooperative car parking: The copark approach. In 2016 IEEE International Smart Cities Conference (ISC2), pages 1–8, Sept 2016.a decentralised car parking allocation mechanism:
-
在停车场门口提供有关可用停车位的初始信息支持车辆
-
使用车辆合作共享停车位置的意图并协商解决竞争
-
-
-
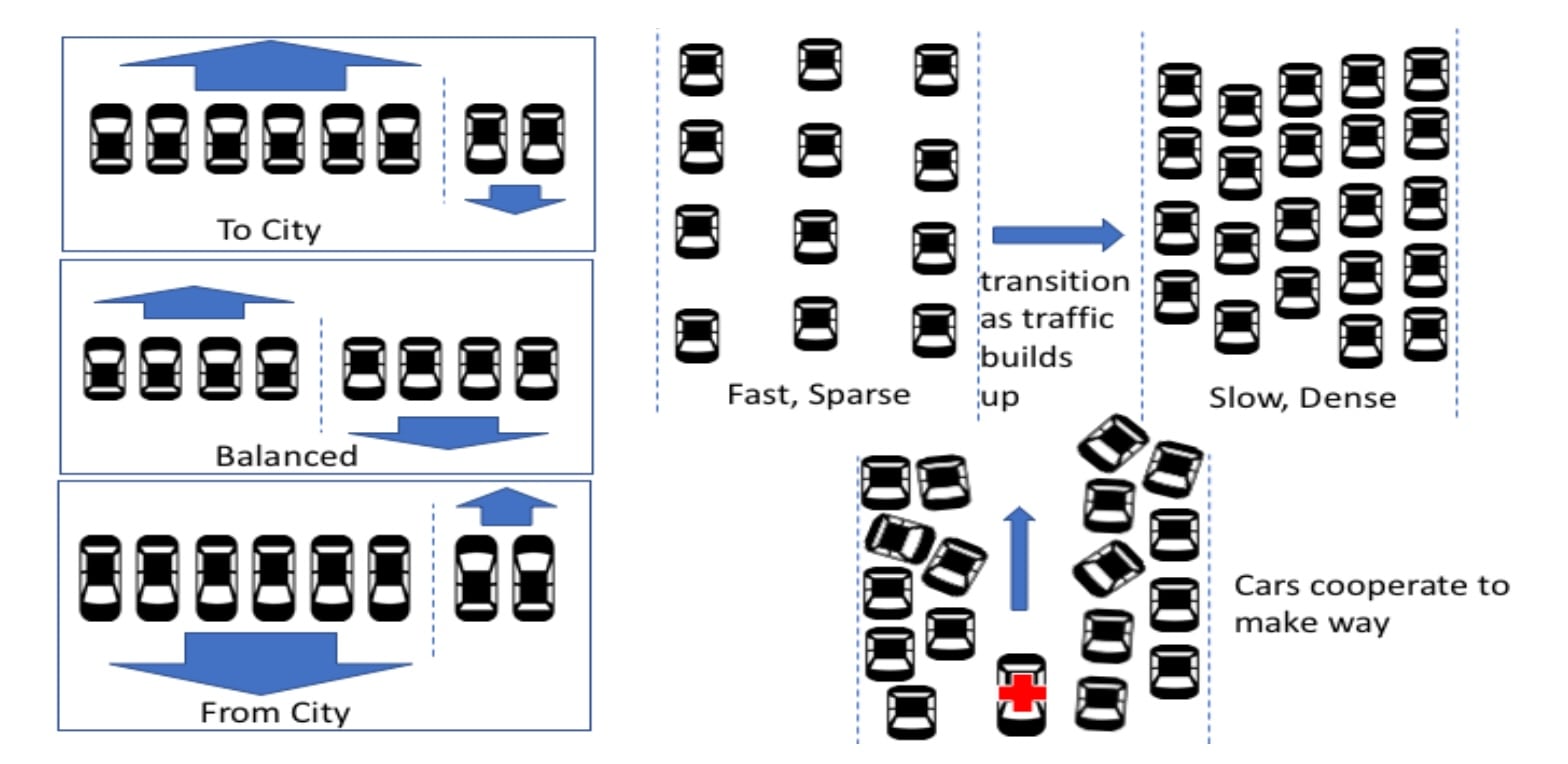
Routing:vehicles coordinating their routes, can distribute themselves along faster, even if longer, routes
-
Prajakta Desai, Seng Wai Loke, Aniruddha Desai, and Jugdutt Singh. CARAVAN: congestion avoidance and route allocation using virtual agent negotiation. IEEE Trans. Intelligent Transportation Systems, 14(3):1197–1207, 2013车辆 opportunistically cooperating, DSRC v2v 通信,在不同的十字路口,可以缓解大面积的交通拥堵;
与所有只走最短距离的路线相比,车辆可以更快地到达目的地 30%。
Swarm Behaviours for Dynamic Traffic Flows
-
无信号路口导航
-
形成灵活的集体车辆行为
-
Andreas Riener and Alois Ferscha. Enhancing Future Mass ICT with Social Capabilities, pages 141–184. Springer Berlin Heidelberg, Berlin, Heidelberg, 2013"traffic shaping"
-
Emergency vehicle lane pre-clearing: From microscopic cooperation to routing decision makingemergency vehicle (EV) passing through: 紧急车辆让路,描述为混合整数非线性规划 (MINP) 问题,旨在
(i) 保证 EV 的所需速度,以及 (ii) 最小化对connected vehicles, CV 的干扰。
-
Platooning, Intersections and Safety
Vehicles can opportunistically platoon to improve travel times, road usage, and safely
当车辆在信号交叉口一起移动时,车辆之间通过车对车通信进行合作,减少车辆间距,可以产生更好的结果——减少不必要的速度波动和不必要的停车。
A. Aliedani and S. W. Loke. Cooperative autonomous vehicles: An investigation of the drop-off problem. IEEE Transactions on Intelligent Vehicles, 3(3):310–316, Sept 2018.对于自动驾驶汽车,不仅仅是停车,其行为的一个主要方面是让乘客下车。自动驾驶车辆也可以形成队列并调整彼此的相对速度,以便有效地让乘客下车。
Cooperative Awareness
在自动驾驶上的增强态势感知,提高每辆车的环境意识。
Long Term Cooperation - Social Networks and Social Memory
例如,汽车在不同时间轮流让路或推迟停车位,社交记忆为未来的 v2v 通信提供了上下文,从而提高了表达意图的效率。
Cooperation with Different Types of Vehicles
无人机与车辆的结合使用,救灾,死角。
轮椅与自动驾驶车辆集成,从而可以构建门到门运输的集成系统(协调在何处下车和接送)
-
总结
B. Vehicle-to-Pedestrian Cooperation
专用短程通信(Dedicated Short Range Communications)手机的智能手机提供了车辆到行人框架
Challenges
A. Scales of Cooperation (怎样处理异质交通对象/没有联网的车)
Cooperation among vehicles has been formulated as a constrained optimal control problem. 受约束的最优控制问题
exact knowledge of requirements might be difficult to obtain in real-time
J. Rios-Torres and A. A. Malikopoulos. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps. IEEE Transactions on Intelligent Transportation Systems, 18(5):1066–1077, May 2017.
: 一个问题是,为了“开始实现潜在收益”,联网车辆的最低数量是多少?如何与其他未配备车辆共存?
B. Trusted Communications and Deception-Proofing
车辆可以形成联盟,从而阻止非联盟车辆利用车辆合作,还需要对恶意联盟行为具有稳健性。
可以从不同位置的不同基础设施 (RSU) 接收信息。
C. Standards: Cooperation Protocols and Behaviour
消息传输的标准化?是否应该标准化 CAV 的响应方式,而不仅仅是消息?
D. How Should Vehicles Talk to Each Other and with the Infrastructure?
when and why? is there a standard?
E. Context-Aware Decision-Making and Regulations
识别特定区域
F Lawful Interactions
