Potential Field Methods and Their Inherent Limitations for Mobile Robot Navigation
From Proceedings of the IEEE Conference on Robotics and Automation, Sacramento, California, April 7-12, 1991, pp. 1398-1404
by Y. Koren, Senior Member, IEEE and J. Borenstein, Member, IEEE The University of Michigan, Ann Arbor
ABSTRACT
- PFM being popular obstacle avoidance applications
- because of its elegance and simplicity
- shortcomings are inherent issues
- This paper presents a systematic criticism of the inherent problems
- The identified problems are discussed in qualitative and theoretical terms
- documented with experimental results from actual mobile robot runs
Introduction
- PFM is for obstacle avoidance (obstacles exert repulsive forces while the target applies an attractive force to the robot)
- initial design is slow
- we developed a PFM: virtual force field (VFF)
The Virtual Force Field (VFF) Method
-
designed for real-time obstacle avoidance with fast mobile robots
-
feature: fast, continuous, and smooth motion
-
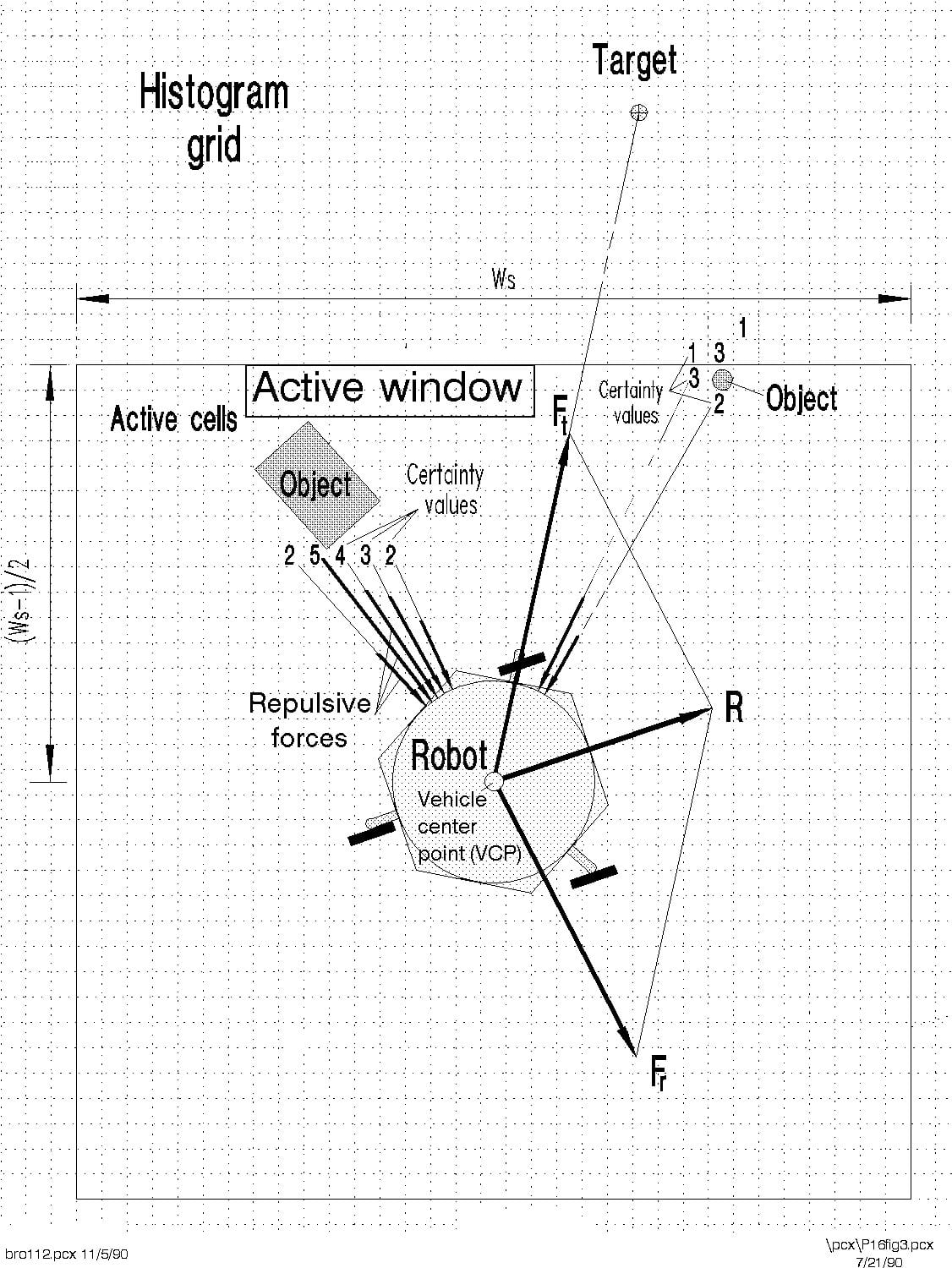
method: two-dimensional Cartesian grid( histogram grid C )
-
Each cell (i,j) in the histogram grid holds a certainty value (CV) :
represents the confidence of the algorithm in the existence of an obstacle at that location
-
dynamic active region (33x33)
-
Each active cell exerts a virtual repulsive force toward the robot.
-
The magnitude of this force is proportional to and inversely proportional to (distence between cell and object)
-
-
Robot-Environment Mathematical Analysis
引入一个微分方程,描述机器人受环境影响的运动, 该方程基于将转向系统( steering system )模型与环境参数相结合。
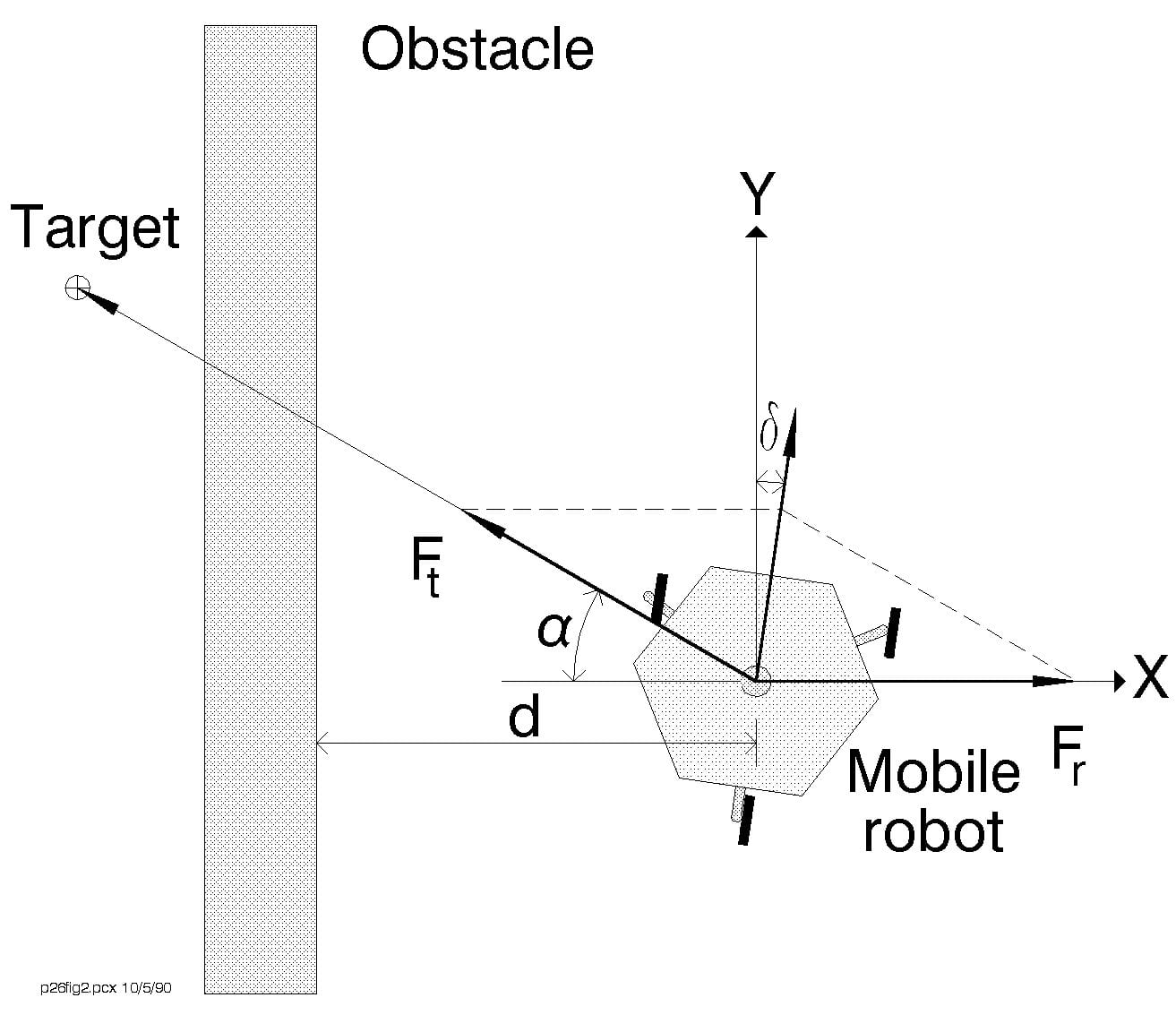
可能会引起机器人来回震荡,停滞不前。
The Experimental System
real world experiement: CARMEL (Computer-Aided Robotics for Maintenance, Emergency, and Life support)
Problems with Potential Field Methods
4 significant problems that are inherent to PFMs and independent of the particular implementation:
-
Trap situations due to local minima (cyclic behavior).
- a dead end (e.g., inside a U-shaped obstacle)
- Remedies: heuristic recovery rules -> non-optimal path & local path planner (LPP) + integrated global path planner (GPP)
-
No passage between closely spaced obstacles.
-
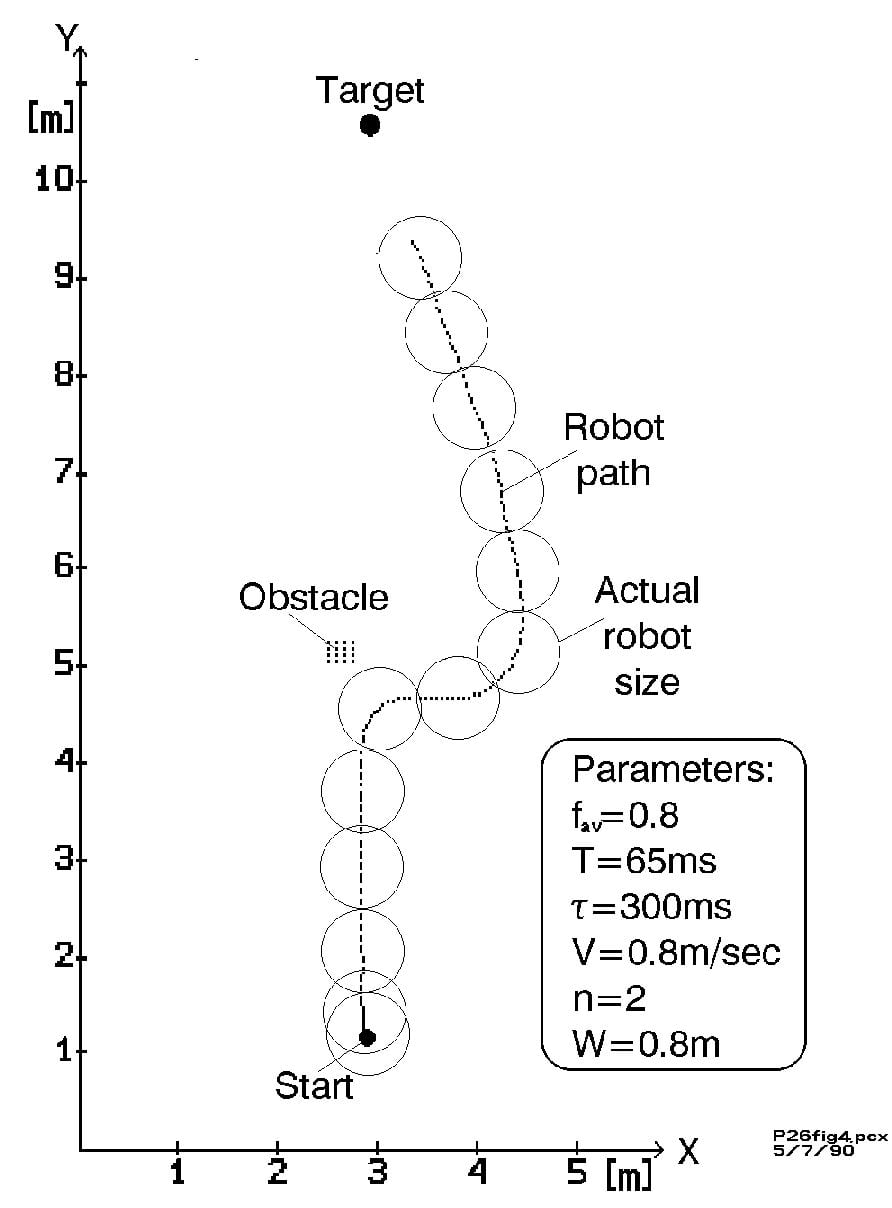
Oscillations in the presence of obstacles.
-
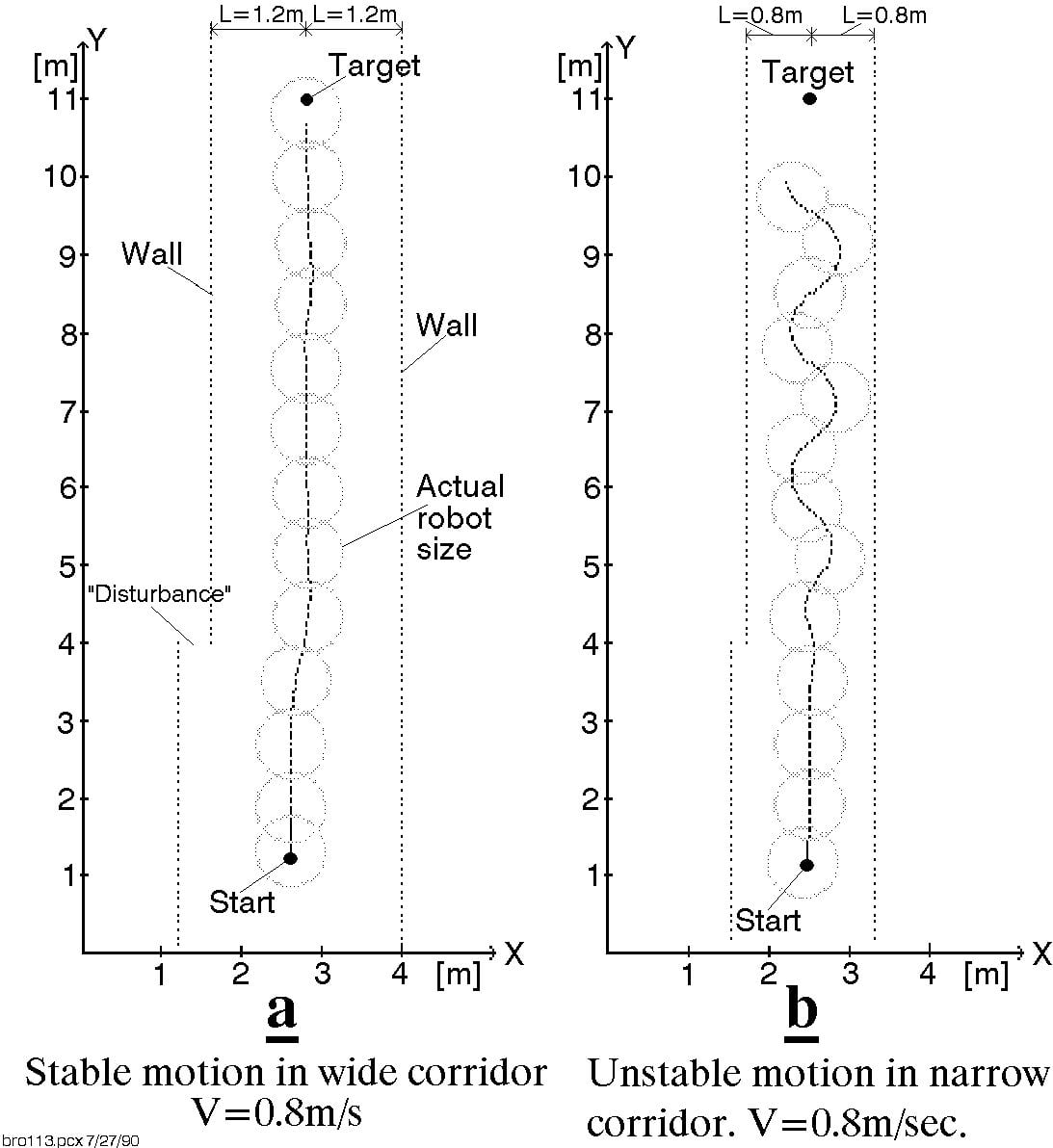
Oscillations in narrow passages ( pass by unstable motions ).
Conclusion
基于严格的数学分析,我们对势场方法 (PFM) 的固有问题进行了系统概述和批判性讨论。
具体来说,我们已经确定了四个明显的缺点。这些缺点中的两个与振荡的可能性有关,只有当 PFM 在高速实时系统中实现时才会变得明显。大多数研究人员将精力集中在潜在场的模拟程序上;他们似乎没有意识到一旦尝试在实验系统中实际实施,必然会出现的实质性的、可能无法解决的问题。其他研究人员使用实际的移动机器人工作,但速度较慢,这掩盖了 PFM 的缺点。 由于这些原因,我们完全放弃了势场方法,并开发了一种快速避障的新方法。这种方法称为矢量场直方图 (VFH) 方法,可产生平滑的非振荡运动,而采样时间和硬件与 VFF 方法中使用的相同。 VFH方法在下一篇论文中被介绍。
附录
https://zhuanlan.zhihu.com/p/104048823
Motion Planning
Motion Planning是在遵循道路交通规则的前提下,将自动驾驶车辆从当前位置导航到目的地的一种方法。
约束条件(constraints):
- 车辆运动学约束
- 静态障碍物(Static Obstacle)约束
- 动态障碍物约束
- 道路交通规则约束
Motion Planning的优化目标
1)关注路径长度(Path Length),寻求到达目的地的最短路径。
2)关注通行时间(Travel Time),寻求到达目的地的最短时间。
3)惩罚偏离参考轨迹和参考速度的行为。
4)考虑轨迹平滑性(Smoothness)
5)考虑曲率约束(Curvature)
通过组合设计自己的目标优化函数,从而获得较好的Planning效果。
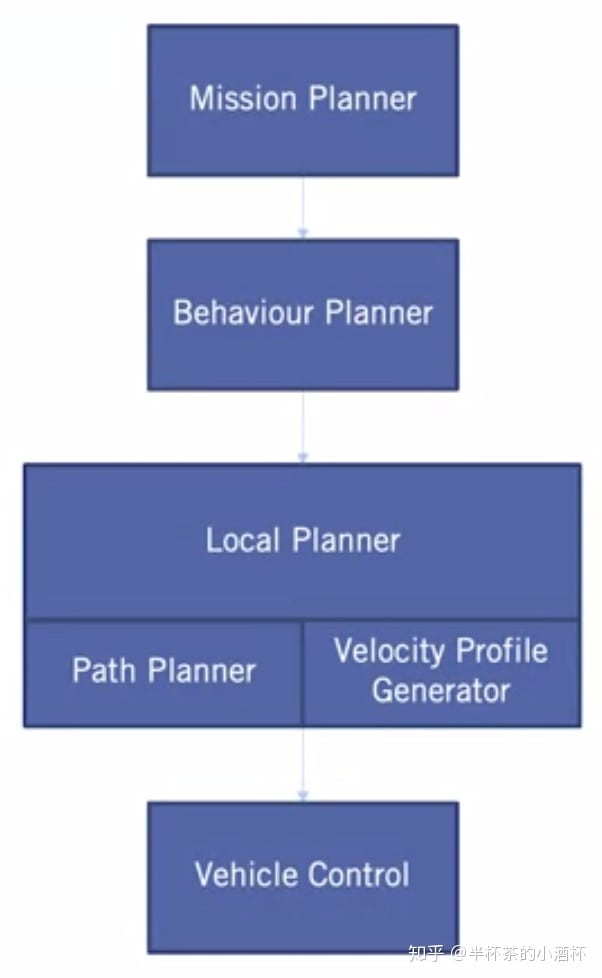
分级运动规划器(Hierarchical Motion Planning)
Motion Planning是一个异常复杂的问题,所以通常我们把它切分为一系列的子问题。
-
Mission Planner 关注High-Level的地图级别的规划;通过Graph Based的图搜索算法实现自动驾驶路径的规划。
-
Behavior Planner 主要关注交通规则、其它道路交通参与者(自行车、行人、社会车辆)等等,决定在在当前场景下应该采取何种操作(如停车让行、加速通过、避让行人等等)。
-
Local Planner 关注如何生成舒适的、碰撞避免的行驶路径和舒适的运动速度,所以Local Planner 又可以拆分为两个子问题:Path Planner和Velocity Profile Generation。Path Planner又分为 Sampling-Based Planner、Variational Planner 和 Lattice Planner。
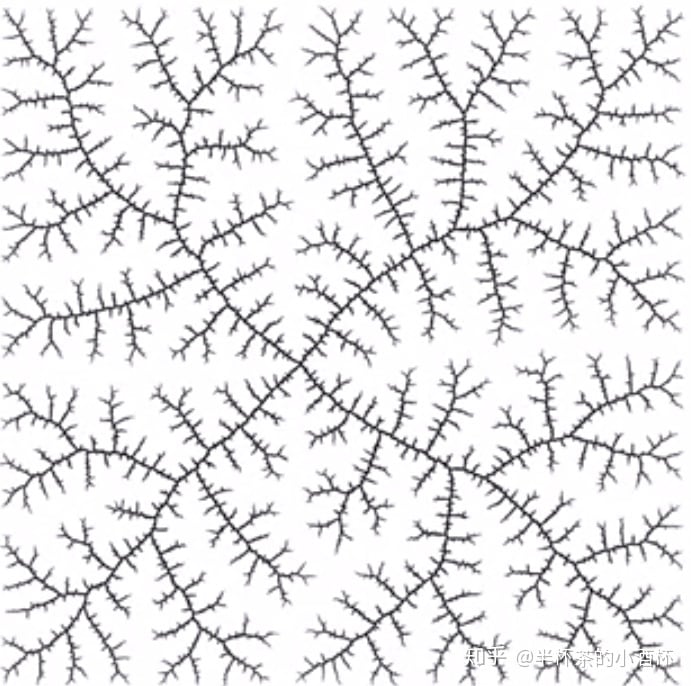
- 最经典的Sampling-Based Planner算法是Rapidly Exploring Random Tree,RRT算法。
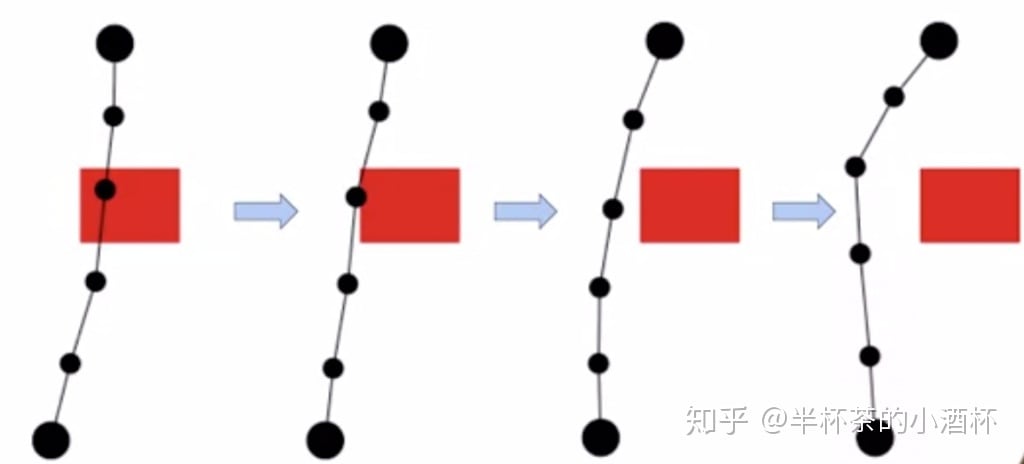
- Variational Planner根据Cost Function进行优化调整,从而避开障碍物,生成安全的轨迹。
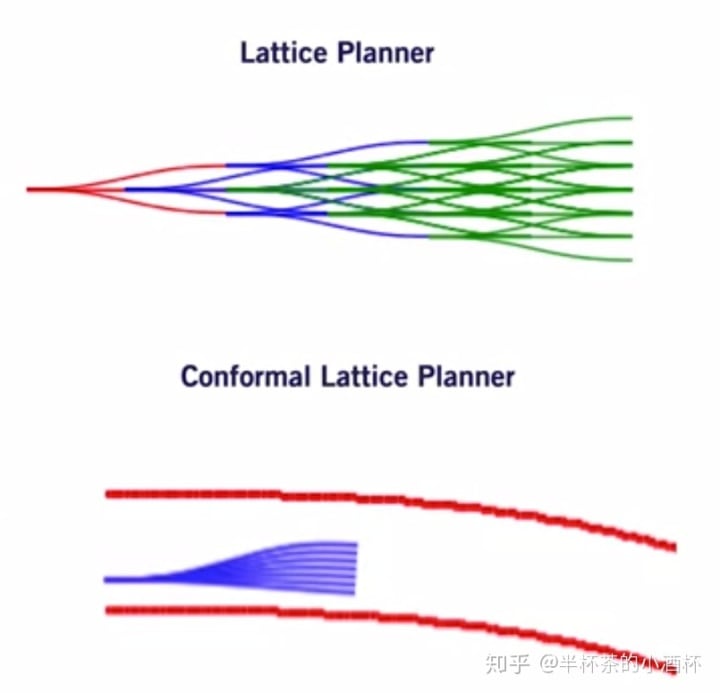
- Lattice Planner将空间搜索限制在对车辆可行的Action Space。
- Velocity Profile Generation要考虑到限速、速度的平滑性等。
