Real-time obstacle avoidance for fast mobile robots in cluttered environments
From 1990 IEEE International Conference on Robotics and Automation, Proceedings pp. 572-577, 13 May 1990.
By Johann Borenstein (IEEE Member; Assistant Research Scientist), and Yoram Koren (IEEE Senior Member; Paul G. Goebel Professor of Engineering)
Abstract
-
Method feature:
VFH ( Vector Field Histogram ): real-time obstacle avoidance method, permits the detection of unknown obstacles and avoids collisions while simultaneouslysteering the mobile robot toward the target.
maneuvers quickly and without stopping among densely cluttered obstacles.
-
Method brief explained:
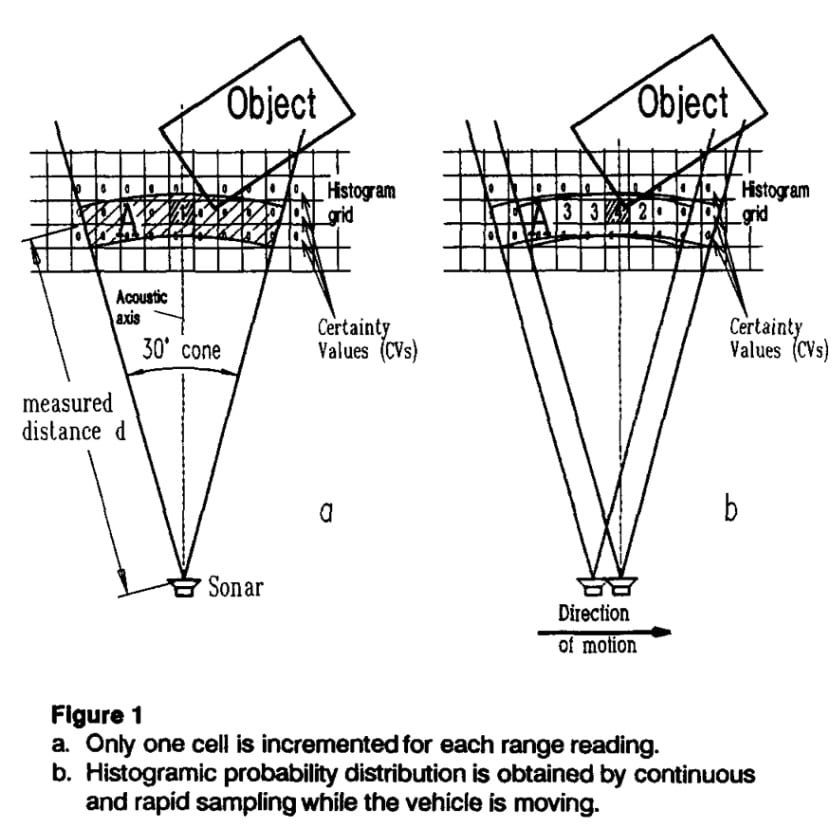
uses a two-dimensional Cartesian Histogram Grid as a world model which updated in real-time with range data sampled by the onboard ultrasonic range sensors.
computes a one-dimensional Polar Histogram around the robot's momentary location. Each sector in the Polar Histogram holds the polar obstacle density in that direction.
selects the most suitable sector from Polar Histogram sectors with low obstacle density, and steering to it.
Introduction
previous research:
VFF( Virtual Force Field)
- virtual repulsive forces v.s. virtual attractive force -> not for real-time navigation
Brooks (1986) and Arkin (1989)'s implementation (with ultrasonic sensors)
- more prone to sensor errors, real-time but not fast: traverse an obstacle course at 0.12 cm/sec
limitations
- can't pass narrow passages
- instability of motion when traveling within narrow corridors
This paper:
introduce Vector Field Histogram (VFH) method:
- real-time & fast-running
- smooth motion of the controlled vehicle among densely cluttered and unexpected obstacles
- easily enter narrow passages at high speeds and without oscillations
The Histogram Grid for Sensor-based World Mockling
VFH uses a two-dimensional Cartesian Histogram Grid for the representation of obstacles
- from the concept of "certainty grid", but updated in real-time
- each cell represents the confidence of the algorithm in the existence of an obstacle at that location
- computaional easy compared to CMU's certainty grid method
How to achieve computational easy?
Only ONE cell is updated each time, and when it is moving, the same cell and its neighboring cells are repeatedly incremented.
The Vector Field Histogram Method
two-stage data reduction + 3 levels of data representation
a. 上帝视角,直方格(C)不动,但是小sample grid: "active region" (denoted C*) 实时更新。
b. 中间层 : 绕机器人的瞬时中心构建了一个极坐标直方图,
c. 数据表示的最低级别是 VFH 算法的输出:车辆驱动和转向控制器的参考值。
First Data Reduction: Creation of the Polar Histogram
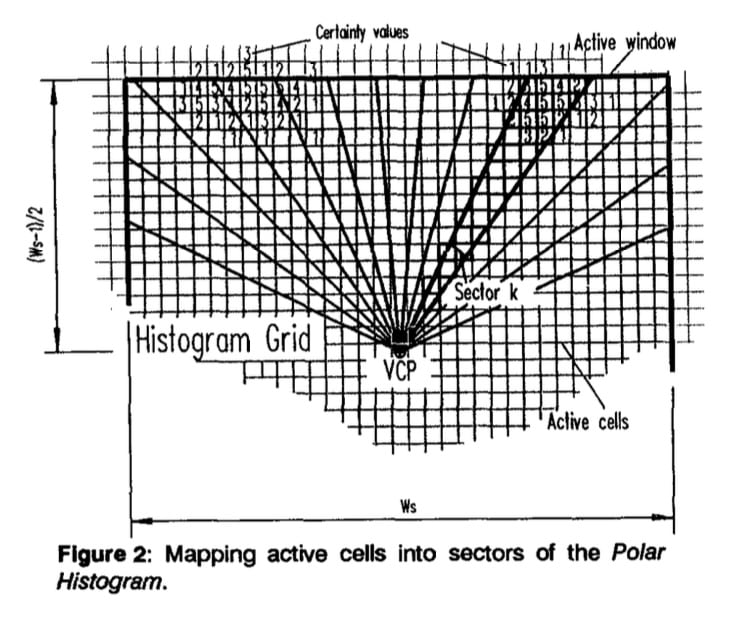
The first data reduction stage maps the active region of the Histogram Grid C* into the Polar Histogram H.
the direction of which is determined by the direction from the cell to the Vehicle Center Point (VCP).
and the magnitude is given by:
因此重复的信号代表了真实的障碍而不是错误信号。并且使用了一个平滑函数来保证转向不会 ragged and cause errors:
Second Data Reduction: Computation of Steering Control
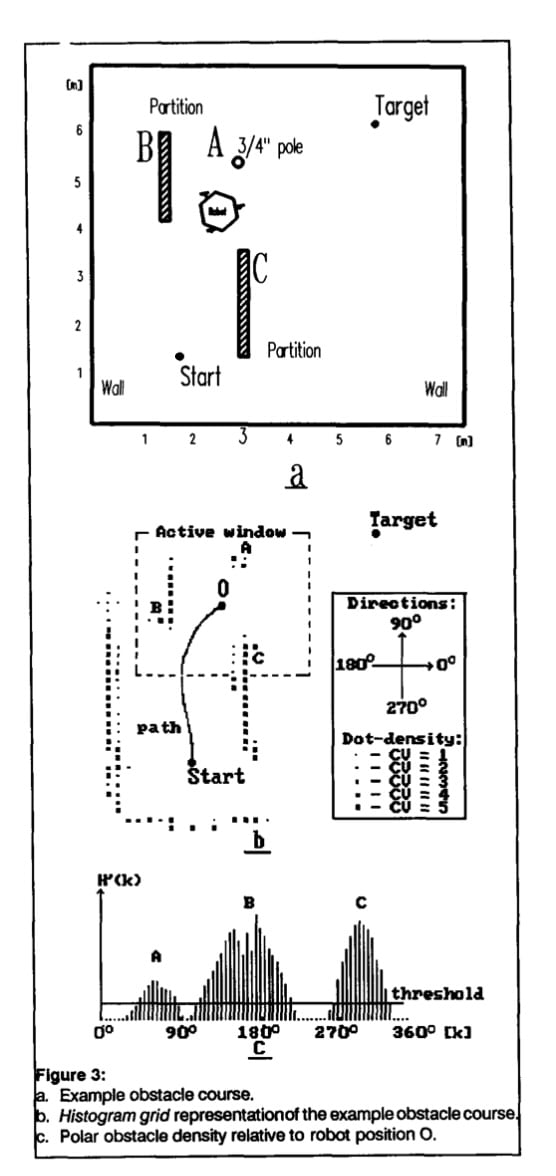
- Polar Histogram typically has peaks (sectors with high obstacle density), and valleys (sectors with low obstacle density)
- Any valley with obstacle densities below threshold is a candidate for travel
- selects the one that most closely matches the direction to the target
在较为窄的valley 中选择谷的中心,以便在机器人的每一侧保持相等的间隙。如果选择的山谷非常宽(例如,当只有一个障碍物靠近机器人时),算法选择几个扇区“深入”山谷,但不一定在其中心。
Speed Control
-
set max speed at the beginning of a run.
-
VFH try to maintained that unless forced by the VFH algorithm to a lower instantaneous speed S: When turning into new directions: , where
-
speed can be further reduced proportionally to the actual steering rate
Experimental Results
商用移动平台(Cybermation,1987),三轮同步驱动,可全向转向,24 个超声波传感器
在大多数实验中,车辆以最大速度(0.78 m/sec)运行。仅当正面接近障碍物或出于动态原因需要时,此速度才会降低。
Conclusions
VFH 的优势在于对存在障碍物的高可能性集合做出响应,同时忽略单个(错误的)数据点。 此外,由于在中间数据级别(free valleys)仍然可以获得有关狭窄通道的信息,因此车辆能够通过狭窄通道或通过狭窄走廊而不会出现振荡。
